Rubriques du site
Le choix des éditeurs:
- Comment remplir une demande de prêt pour une personne morale
- Moyens de paiement électroniques
- Comment obtenir de l'argent dans OTP Bank et que faut-il faire pour cela ?
- Les principaux actes réglementaires en matière bancaire Les documents juridiques réglementaires réglementant les activités de la banque
- banque analyse financière otp banque
- Compte d'épargne : banques, conditions, taux
- Faut-il toujours assurer la vie lors d'une demande de prêt bancaire et est-il possible de refuser
- Commerce de détail : paiements standard
- Poisson précieux au Japon. Poisson dans la cuisine japonaise. Kajiki - marlin rayé et espadon
- Où sont passés les Mayas ? Où sont passés les Mayas ? Maya existe toujours
Publicité
| Capteurs analogiques : application, modes de connexion au contrôleur. Raccordement de capteurs avec sortie courant à des appareils secondaires Le système se compose de |
|
Capteurs discrets Un tel algorithme évite l'impact lorsque le moule est fermé, sinon il peut simplement être divisé en petits morceaux. Le même changement de vitesse se produit lorsque le moule est ouvert. Ici, deux capteurs de contact sont indispensables. Application de capteurs analogiques Figure 2. Pont de Wheatstone Connexion de capteurs analogiques
Sorties de capteur analogiques
Mais la question, en règle générale, ne suffit pas avec un seul capteur. Certaines des mesures les plus populaires sont les mesures de température et de pression. Le nombre de ces points dans la production moderne peut atteindre plusieurs dizaines de milliers. En conséquence, le nombre de capteurs est également important. Par conséquent, plusieurs capteurs analogiques sont le plus souvent connectés à un contrôleur à la fois. Bien sûr, pas plusieurs milliers à la fois, c'est bien si une douzaine est différente. Une telle connexion est illustrée à la figure 7.
Figure 7. Connexion de plusieurs capteurs analogiques au contrôleur Cette figure montre comment une tension est obtenue à partir d'un signal de courant, apte à être converti en un code numérique. S'il existe plusieurs signaux de ce type, ils ne sont pas traités en même temps, mais sont séparés dans le temps, multiplexés, sinon un ADC séparé devrait être installé sur chaque canal. A cet effet, le contrôleur dispose d'un circuit de commutation de circuit. Le schéma fonctionnel de l'interrupteur est illustré à la figure 8.
Figure 8. Commutateur de canal de capteur analogique (image cliquable) Les signaux de la boucle de courant convertis en tension aux bornes de la résistance de mesure (UR1…URn) sont envoyés à l'entrée du commutateur analogique. Les signaux de commande font alternativement passer en sortie l'un des signaux UR1...URn, qui sont amplifiés par l'amplificateur, et sont alternativement amenés à l'entrée du CAN. La tension convertie en un code numérique est fournie au contrôleur. Le schéma, bien sûr, est très simplifié, mais il est tout à fait possible d'y envisager le principe du multiplexage. C'est approximativement ainsi que le module d'entrée des signaux analogiques des contrôleurs MCTS (système à microprocesseur des moyens techniques) produit par le PC "Prolog" de Smolensk est construit. La sortie de tels contrôleurs a longtemps été interrompue, bien que dans certains endroits, loin d'être les meilleurs, ces contrôleurs soient toujours utilisés. Ces expositions de musée sont remplacées par des contrôleurs de nouveaux modèles, principalement de production importée (chinoise). Si le contrôleur est monté dans une armoire métallique, il est recommandé de connecter les tresse de blindage au point de masse de l'armoire. La longueur des lignes de raccordement peut atteindre plus de deux kilomètres, ce qui est calculé à l'aide des formules appropriées. Nous ne compterons rien ici, mais croyons qu'il en est ainsi. Nouveaux capteurs, nouveaux contrôleurs Avec l'avènement de nouveaux contrôleurs, de nouveaux capteurs analogiques sont également apparus qui fonctionnent à l'aide du protocole HART (Highway Addressable Remote Transducer), qui se traduit par "Transducteur de mesure adressé à distance via le tronc". Le signal de sortie du capteur (appareil de terrain) est un signal de courant analogique dans la plage de 4 ... 20 mA, auquel un signal de communication numérique modulé en fréquence (FSK - Frequency Shift Keying) est superposé. On sait que la valeur moyenne du signal sinusoïdal est égale à zéro, par conséquent, la transmission d'informations numériques n'affecte pas le courant de sortie du capteur 4 ... 20mA. Ce mode est utilisé lors de la configuration des capteurs. La communication HART s'effectue de deux manières. Dans le premier cas, le standard, seuls deux appareils peuvent échanger des informations sur une ligne à deux fils, tandis que le signal analogique de sortie 4 ... 20mA dépend de la valeur mesurée. Ce mode est utilisé lors de la configuration des appareils de terrain (capteurs). Dans le second cas, jusqu'à 15 capteurs peuvent être connectés à une ligne à deux fils, dont le nombre est déterminé par les paramètres de la ligne de communication et la puissance de l'alimentation. C'est le mode multipoint. Dans ce mode, chaque capteur a sa propre adresse dans la plage 1…15, par laquelle le dispositif de contrôle y accède. Le capteur avec l'adresse 0 est déconnecté de la ligne de communication. L'échange de données entre le capteur et le dispositif de contrôle en mode multipoint s'effectue uniquement par un signal de fréquence. Le signal de courant du capteur est fixé au niveau requis et ne change pas. Les données dans le cas d'une communication multipoint signifient non seulement les résultats des mesures du paramètre contrôlé, mais également un ensemble complet d'informations de service de toutes sortes. Ce sont tout d'abord les adresses des capteurs, les commandes de contrôle, les réglages. Et toutes ces informations sont transmises sur des lignes de communication à deux fils. Est-il possible de s'en débarrasser également ? Certes, cela doit être fait avec précaution, uniquement dans les cas où la connexion sans fil ne peut pas affecter la sécurité du processus contrôlé. Ce sont les technologies qui ont remplacé l'ancienne boucle de courant analogique. Mais il n'abandonne pas non plus ses positions, il est largement utilisé partout où cela est possible. Dans le processus d'automatisation des processus technologiques pour le contrôle des mécanismes et des unités, il faut faire face à des mesures de diverses grandeurs physiques. Il peut s'agir de la température, de la pression et du débit de liquide ou de gaz, de la vitesse de rotation, de l'intensité lumineuse, des informations sur la position des pièces des mécanismes, et bien plus encore. Ces informations sont obtenues à l'aide de capteurs. Ici, d'abord, sur la position des pièces des mécanismes. Capteurs discrets Le capteur le plus simple est un contact mécanique classique : la porte s'ouvre - le contact s'ouvre, se ferme - il se ferme. Un capteur aussi simple, ainsi que l'algorithme de fonctionnement ci-dessus, sont souvent utilisés dans les alarmes antivol. Pour un mécanisme à mouvement de translation, qui a deux positions, par exemple une vanne à eau, vous aurez déjà besoin de deux contacts: un contact est fermé - la vanne est fermée, l'autre est fermée - elle est fermée. Un algorithme de mouvement de translation plus complexe a un mécanisme pour fermer le moule d'une machine de moulage par injection. Initialement, le moule est ouvert, c'est la position de départ. Dans cette position, les produits finis sont retirés du moule. Ensuite, le travailleur ferme la clôture de protection et le moule commence à se fermer, un nouveau cycle de travail commence. La distance entre les moitiés du moule est assez grande. Par conséquent, au début, le moule se déplace rapidement et, à une certaine distance avant la fermeture des moitiés, l'interrupteur de fin de course se déclenche, la vitesse de déplacement diminue considérablement et le moule se ferme en douceur. Ainsi, les capteurs à contact sont discrets ou binaires, ont deux positions, fermé - ouvert ou 1 et 0. En d'autres termes, vous pouvez dire qu'un événement s'est produit ou non. Dans l'exemple ci-dessus, plusieurs points sont « rattrapés » par les contacts : le début du mouvement, le point de décélération, la fin du mouvement. En géométrie, un point n'a pas de dimensions, juste un point et c'est tout. Elle peut être soit (sur une feuille de papier, dans la trajectoire, comme dans notre cas) soit elle n'existe tout simplement pas. Par conséquent, des capteurs discrets sont utilisés pour détecter des points. Il se peut qu'une comparaison avec un point ne soit pas très appropriée ici, car en pratique on utilise la valeur de la précision d'un capteur discret, et cette précision est bien supérieure à un point géométrique. Mais en soi, le contact mécanique est une chose peu fiable. Par conséquent, dans la mesure du possible, les contacts mécaniques sont remplacés par des capteurs sans contact. L'option la plus simple est les interrupteurs à lames : l'aimant se rapproche, le contact se ferme. La précision du fonctionnement de l'interrupteur à lames laisse beaucoup à désirer ; de tels capteurs ne sont utilisés que pour déterminer la position des portes. Une option plus complexe et précise devrait être considérée comme divers capteurs sans contact. Si le drapeau métallique est entré dans la fente, le capteur a fonctionné. Des capteurs BVK (Proximity Limit Switch) de différentes séries peuvent être cités comme exemple de tels capteurs. La précision de réponse (différentiel de course) de ces capteurs est de 3 millimètres. Capteur série BVK Figure 1. Capteur série BVK La tension d'alimentation des capteurs BVK est de 24V, le courant de charge est de 200mA, ce qui est tout à fait suffisant pour connecter des relais intermédiaires pour une coordination plus poussée avec le circuit de commande. C'est ainsi que les capteurs BVK sont utilisés dans divers équipements. En plus des capteurs BVK, des capteurs de types BTP, KVP, PIP, KVD, PISCH sont également utilisés. Chaque série comporte plusieurs types de capteurs, indiqués par des numéros, par exemple, BTP-101, BTP-102, BTP-103, BTP-211. Tous les capteurs mentionnés sont discrets sans contact, leur objectif principal est de déterminer la position de pièces de mécanismes et d'assemblages. Naturellement, il existe de nombreux autres capteurs de ce type ; il est impossible de les décrire tous dans un seul article. Divers capteurs de contact sont encore plus courants et encore largement utilisés. Application de capteurs analogiques Outre les capteurs discrets, les capteurs analogiques sont largement utilisés dans les systèmes d'automatisation. Leur but est d'obtenir des informations sur diverses grandeurs physiques, et pas seulement comme ça en général, mais en temps réel. Plus précisément, la conversion d'une grandeur physique (pression, température, éclairement, débit, tension, courant) en un signal électrique apte à être transmis via des lignes de communication au contrôleur et son traitement ultérieur. Les capteurs analogiques sont généralement situés assez loin du contrôleur, c'est pourquoi ils sont souvent appelés appareils de terrain. Ce terme est souvent utilisé dans la littérature technique. Un capteur analogique se compose généralement de plusieurs parties. La partie la plus importante est l'élément sensible - le capteur. Son but est de convertir la valeur mesurée en un signal électrique. Mais le signal reçu du capteur est généralement faible. Pour obtenir un signal adapté à l'amplification, le capteur est le plus souvent inclus dans un circuit en pont - un pont de Wheatstone. Pont de Wheatstone Figure 2. Pont de Wheatstone Le but initial du circuit en pont est de mesurer avec précision la résistance. Une source CC est connectée à la diagonale du pont AD. Un galvanomètre sensible avec un point médian, avec zéro au milieu de l'échelle, est connecté à l'autre diagonale. Pour mesurer la résistance de la résistance Rx en faisant tourner la résistance d'accord R2, le pont doit être équilibré, l'aiguille du galvanomètre doit être réglée sur zéro. La déviation de la flèche de l'appareil dans un sens ou dans l'autre permet de déterminer le sens de rotation de la résistance R2. La valeur de la résistance mesurée est déterminée par l'échelle, combinée avec la poignée de la résistance R2. La condition d'équilibre du pont est l'égalité des rapports R1/R2 et Rx/R3. Dans ce cas, une différence de potentiel nulle est obtenue entre les points BC et aucun courant ne traverse le galvanomètre V. La résistance des résistances R1 et R3 est sélectionnée très précisément, leur propagation doit être minimale. Seulement dans ce cas, même un petit déséquilibre du pont provoque un changement assez notable de la tension de la diagonale BC. C'est cette propriété du pont qui est utilisée pour connecter des éléments sensibles (capteurs) de divers capteurs analogiques. Eh bien, tout est simple, une question de technologie. Pour utiliser le signal reçu du capteur, son traitement ultérieur est nécessaire - amplification et conversion en un signal de sortie adapté à la transmission et au traitement par le circuit de commande - le contrôleur. Le plus souvent, le signal de sortie des capteurs analogiques est en courant (boucle de courant analogique), moins souvent en tension. Pourquoi courant ? Le fait est que les étages de sortie des capteurs analogiques sont basés sur des sources de courant. Cela vous permet de vous débarrasser de l'influence de la résistance des lignes de connexion sur le signal de sortie, d'utiliser des lignes de connexion de grande longueur. La transformation ultérieure est assez simple. Le signal de courant est converti en tension, pour laquelle il suffit de faire passer le courant à travers une résistance de résistance connue. La chute de tension aux bornes de la résistance de mesure est obtenue selon la loi d'Ohm U=I*R. Par exemple, pour un courant de 10 mA aux bornes d'une résistance de 100 Ohm, la tension sera de 10 * 100 = 1000 mV, soit au total 1 volt ! Dans ce cas, le courant de sortie du capteur ne dépend pas de la résistance des fils de connexion. Dans des limites raisonnables, bien sûr. Connexion de capteurs analogiques La tension obtenue sur la résistance de mesure est facilement convertie en une forme numérique adaptée à l'entrée dans le contrôleur. La conversion est effectuée à l'aide de convertisseurs analogique-numérique ADC. Les données numériques sont transmises au contrôleur en code série ou parallèle. Tout dépend du schéma de commutation spécifique. Un schéma simplifié de connexion du capteur analogique est illustré à la Figure 3. Connexion d'un capteur analogique Figure 3. Connexion d'un capteur analogique (cliquez sur l'image pour l'agrandir) Les actionneurs sont connectés au contrôleur, ou le contrôleur lui-même est connecté à un ordinateur inclus dans le système d'automatisation. Naturellement, les capteurs analogiques ont une conception complète, dont l'un des éléments est un boîtier avec des éléments de connexion. A titre d'exemple, la figure 4 montre l'aspect du capteur de surpression de type Zond-10. Capteur de surpression Zond-10 Figure 4. Capteur de surpression Zond-10 Au bas du capteur, vous pouvez voir le fil de connexion pour la connexion au pipeline, et à droite, sous le couvercle noir, il y a un connecteur pour connecter la ligne de communication au contrôleur. La connexion filetée est scellée avec une rondelle en cuivre recuit (fournie avec le capteur), et en aucun cas avec du fum-tape ou du lin. Ceci est fait pour que lors de l'installation du capteur, l'élément de capteur situé à l'intérieur ne soit pas déformé. Sorties de capteur analogiques Selon les normes, il existe trois gammes de signaux de courant : 0…5mA, 0…20mA et 4…20mA. Quelle est leur différence et quelles fonctionnalités ? Le plus souvent, la dépendance du courant de sortie est directement proportionnelle à la valeur mesurée, par exemple, plus la pression dans le tuyau est élevée, plus le courant à la sortie du capteur est important. Bien que parfois une connexion inverse soit utilisée : une valeur plus grande du courant de sortie correspond à la valeur minimale de la valeur mesurée à la sortie du capteur. Tout dépend du type de contrôleur utilisé. Certains capteurs ont même une commutation du signal direct au signal inverse. Le signal de sortie dans la plage 0...5mA est très faible et donc sensible aux interférences. Si le signal d'un tel capteur fluctue avec une valeur constante du paramètre mesuré, il est recommandé d'installer un condensateur d'une capacité de 0,1 ... 1 μF en parallèle avec la sortie du capteur. Plus stable est le signal de courant dans la plage de 0…20mA. Mais ces deux plages ne sont pas bonnes car zéro au début de l'échelle ne vous permet pas de déterminer sans ambiguïté ce qui s'est passé. Ou le signal mesuré a-t-il réellement pris un niveau zéro, ce qui est en principe possible, ou la ligne de communication s'est-elle simplement cassée ? Par conséquent, ils essaient de refuser l'utilisation de ces gammes, si possible. Le signal des capteurs analogiques avec un courant de sortie dans la plage de 4 ... 20 mA est considéré comme plus fiable. Son immunité au bruit est assez élevée, et la limite inférieure, même si le signal mesuré a un niveau nul, sera de 4mA, ce qui nous permet de dire que la ligne de communication n'est pas coupée. Une autre bonne caractéristique de la gamme 4 ... 20mA est que les capteurs peuvent être connectés avec seulement deux fils, car le capteur lui-même est alimenté par ce courant. C'est son courant de consommation et en même temps un signal de mesure. L'alimentation des capteurs dans la plage 4 ... 20mA est activée, comme illustré à la figure 5. Dans le même temps, les capteurs Zond-10, comme beaucoup d'autres, selon le passeport, ont une large plage de tension d'alimentation de 10 ... 38V, bien que des sources stabilisées avec une tension de 24V soient le plus souvent utilisées. Connexion d'un capteur analogique avec une alimentation externe Figure 5. Connexion d'un capteur analogique avec une alimentation externe Ce schéma contient les éléments et symboles suivants. Rsh - résistance shunt de mesure, Rl1 et Rl2 - résistances des lignes de communication. Pour améliorer la précision de la mesure, une résistance de mesure de précision doit être utilisée comme Rsh. Le passage du courant de l'alimentation est indiqué par des flèches. Il est facile de voir que le courant de sortie de l'alimentation passe de la borne +24V, à travers la ligne Rl1 atteint la borne du capteur +AO2, passe à travers le capteur et à travers le contact de sortie du capteur - AO2, la ligne de connexion Rl2, le la résistance Rsh revient sur la borne d'alimentation -24V. Tout, le circuit est fermé, le courant passe. Si le contrôleur contient une alimentation 24 V, la connexion d'un capteur ou d'un transducteur de mesure est possible selon le schéma illustré à la Figure 6. Connexion d'un capteur analogique à un contrôleur avec une alimentation interne Figure 6. Connexion d'un capteur analogique à un contrôleur avec une alimentation interne Ce diagramme montre un autre élément - une résistance de ballast Rb. Son but est de protéger la résistance de mesure en cas de court-circuit dans la ligne de communication ou de dysfonctionnement du capteur analogique. L'installation d'une résistance Rb est facultative, bien que souhaitable. En plus de divers capteurs, la sortie courant dispose également de transducteurs de mesure, qui sont assez souvent utilisés dans les systèmes d'automatisation. Un transducteur de mesure est un appareil permettant de convertir des niveaux de tension, par exemple 220V ou un courant de plusieurs dizaines ou centaines d'ampères, en un signal de courant de 4 ... 20mA. Ici, le niveau du signal électrique est simplement converti, et non la représentation d'une grandeur physique (vitesse, débit, pression) sous forme électrique. Mais la question, en règle générale, ne suffit pas avec un seul capteur. Certaines des mesures les plus populaires sont les mesures de température et de pression. Le nombre de ces points dans la production moderne peut atteindre plusieurs dizaines Lire aussi
Depuis les années 1950, la boucle de courant est utilisée pour transmettre les données des transducteurs dans les processus de surveillance et de contrôle. Avec de faibles coûts de mise en œuvre, une grande immunité au bruit et la capacité de transmettre des signaux sur de longues distances, la boucle de courant s'est avérée particulièrement adaptée aux environnements industriels. Ce matériel est consacré à la description des principes de base de la boucle de courant, les bases de la conception, de la configuration. Utilisation du courant pour transmettre les données du convertisseur Les capteurs de qualité industrielle utilisent souvent un signal de courant pour transmettre des données, contrairement à la plupart des autres transducteurs tels que les thermocouples ou les jauges de contrainte qui utilisent un signal de tension. Bien que les convertisseurs qui utilisent la tension comme paramètre de communication soient effectivement efficaces dans de nombreuses applications industrielles, il existe un certain nombre d'applications où l'utilisation des caractéristiques de courant est préférable. Un inconvénient important lors de l'utilisation de la tension pour la transmission du signal dans des conditions industrielles est l'affaiblissement du signal lorsqu'il est transmis sur de longues distances en raison de la présence d'une résistance dans les lignes de communication câblées. Vous pouvez, bien sûr, utiliser des appareils à haute impédance d'entrée pour contourner la perte de signal. Cependant, ces appareils seront très sensibles au bruit généré par les moteurs, les courroies d'entraînement ou les émetteurs de diffusion à proximité. Selon la première loi de Kirchhoff, la somme des courants entrant dans un nœud est égale à la somme des courants sortant du nœud. Fig. 1. Selon la première loi de Kirchhoff, le courant au début du circuit est égal au courant à sa fin. C'est le principe de base du fonctionnement de la boucle de mesure : la mesure du courant n'importe où dans la boucle de courant (boucle de mesure) donne le même résultat. En utilisant des signaux de courant et des récepteurs d'acquisition de données à faible impédance d'entrée, les applications industrielles peuvent grandement bénéficier d'une meilleure immunité au bruit et d'une longueur de liaison accrue. Composants de la boucle de courant Fig.2. Schéma fonctionnel de la boucle de courant. Une source CC alimente le système. L'émetteur régule le courant dans les fils de 4 à 20 mA, où 4 mA est un zéro en direct et 20 mA est le signal maximum. Pour vous aider à mieux comprendre le fonctionnement de la boucle de courant, considérons comme exemple une conception de système avec un convertisseur ayant les spécifications suivantes : Le transducteur est utilisé pour mesurer la pression Considérant l'exemple, nous commençons par la sélection d'un convertisseur approprié. Conception actuelle du système Sélection du convertisseur La première étape dans la conception d'un système actuel consiste à choisir un transducteur. Quel que soit le type de grandeur mesurée (débit, pression, température, etc.), un facteur important dans le choix d'un transmetteur est sa tension de fonctionnement. Seule la connexion de l'alimentation au convertisseur vous permet d'ajuster la quantité de courant dans la ligne de communication. La valeur de tension de l'alimentation doit être dans des limites acceptables : supérieure au minimum requis, inférieure à la valeur maximale, ce qui peut endommager l'onduleur. Pour l'exemple de système de courant, le transducteur sélectionné mesure la pression et a une tension de fonctionnement de 12 à 30 V. Lorsque le transducteur est sélectionné, le signal de courant doit être correctement mesuré pour fournir une représentation précise de la pression appliquée au transmetteur. Sélection d'un appareil d'acquisition de données pour la mesure du courant Un aspect important auquel il faut prêter attention lors de la construction d'un système de courant est d'empêcher l'apparition d'une boucle de courant dans le circuit de masse. Une technique courante dans de tels cas est l'isolement. En utilisant une isolation, vous pouvez éviter l'influence de la boucle de terre, dont l'apparition est expliquée à la Fig. 3. Fig.3. Boucle de masse Des boucles de masse se forment lorsque deux bornes sont connectées dans un circuit à des emplacements de potentiel différents. Cette différence entraîne l'apparition de courant supplémentaire dans la ligne de communication, ce qui peut entraîner des erreurs de mesure. Étant donné qu'aucun courant ne peut traverser la barrière d'isolation, les points de masse de l'amplificateur et de la source de signal sont au même potentiel. Cela élimine la possibilité de créer par inadvertance une boucle de masse. Fig.4. Tension de mode commun et tension de signal dans un circuit isolé L'isolation évite également d'endommager le périphérique DAQ en présence de tensions de mode commun élevées. Le mode commun est une tension de même polarité qui est présente aux deux entrées d'un amplificateur d'instrumentation. Par exemple, dans la Fig.4. les entrées positive (+) et négative (-) de l'amplificateur ont une tension de mode commun de +14 V. De nombreux appareils d'acquisition de données ont une plage d'entrée maximale de ±10 V. Si l'appareil d'acquisition de données n'est pas isolé et que la tension de mode commun est en dehors de la plage d'entrée maximale, vous risquez d'endommager l'appareil. Bien que la tension normale (signal) à l'entrée de l'amplificateur de la Fig. 4 ne soit que de +2 V, l'ajout de +14 V peut entraîner une tension de +16 V Avec l'isolement, le point commun de l'amplificateur est électriquement séparé de la masse zéro. Dans le circuit de la figure 4, le potentiel au point commun de l'amplificateur est "élevé" à +14 V. Cette technique fait chuter la valeur de la tension d'entrée de 16 à 2 V. Maintenant que les données sont collectées, l'appareil est ne risque plus d'être endommagé par une surtension. (Notez que les isolateurs ont une tension de mode commun maximale qu'ils peuvent rejeter.) Une fois le collecteur de données isolé et sécurisé, la dernière étape de la configuration de la boucle de courant consiste à sélectionner une source d'alimentation appropriée. Sélection de l'alimentation Il est facile de déterminer quelle alimentation correspond le mieux à vos besoins. Lorsqu'elle fonctionne dans une boucle de courant, l'alimentation doit fournir une tension égale ou supérieure à la somme des chutes de tension sur tous les éléments du système. Le dispositif d'acquisition de données dans notre exemple utilise un shunt de précision pour mesurer le courant. Je*R=U Avec un shunt de 249 Ω, on peut supprimer la tension dans la plage de 1 à 5 V en reliant la valeur de la tension à l'entrée du collecteur de données à la valeur du signal de sortie du transducteur de pression. 12V+ 5V=17V À première vue, une tension de 17 V suffit, mais il faut tenir compte de la charge supplémentaire sur l'alimentation, qui est créée par des fils qui ont une résistance électrique. La résistance d'un brin de 2000 pieds de long sera de 2000 * 2,62 / 100 = 52,4 m. Si vous avez utilisé 17 V pour alimenter le circuit en question, la tension appliquée au transmetteur de pression sera inférieure à la tension de fonctionnement minimale en raison de la chute de la résistance du fil et de la résistance shunt. La sélection d'une alimentation électrique typique de 24 V satisfera les exigences de puissance de l'onduleur. De plus, il existe une marge de tension afin de placer le capteur de pression à une plus grande distance. Avec le bon choix de transducteur, d'appareil d'acquisition de données, de longueurs de câble et d'alimentation, la conception d'une boucle de courant simple est terminée. Pour des applications plus complexes, vous pouvez inclure des canaux de mesure supplémentaires dans le système. Dans le processus d'automatisation des processus technologiques pour le contrôle des mécanismes et des unités, il faut faire face à des mesures de diverses grandeurs physiques. Il peut s'agir de la température, de la pression et du débit de liquide ou de gaz, de la vitesse de rotation, de l'intensité lumineuse, des informations sur la position des pièces des mécanismes, et bien plus encore. Ces informations sont obtenues à l'aide de capteurs. Ici, d'abord, sur la position des pièces des mécanismes. Capteurs discrets Le capteur le plus simple est un contact mécanique classique : la porte s'ouvre - le contact s'ouvre, se ferme - il se ferme. Un tel capteur simple, ainsi que l'algorithme de travail ci-dessus, souvent. Pour un mécanisme à mouvement de translation, qui a deux positions, par exemple une vanne à eau, vous aurez déjà besoin de deux contacts: un contact est fermé - la vanne est fermée, l'autre est fermée - elle est fermée. Un algorithme de mouvement de translation plus complexe a un mécanisme pour fermer le moule d'une machine de moulage par injection. Initialement, le moule est ouvert, c'est la position de départ. Dans cette position, les produits finis sont retirés du moule. Ensuite, le travailleur ferme la clôture de protection et le moule commence à se fermer, un nouveau cycle de travail commence. La distance entre les moitiés du moule est assez grande. Par conséquent, au début, le moule se déplace rapidement et, à une certaine distance avant la fermeture des moitiés, l'interrupteur de fin de course se déclenche, la vitesse de déplacement diminue considérablement et le moule se ferme en douceur. Un tel algorithme évite l'impact lorsque le moule est fermé, sinon il peut simplement être divisé en petits morceaux. Le même changement de vitesse se produit lorsque le moule est ouvert. Ici, deux capteurs de contact sont indispensables. Ainsi, les capteurs à contact sont discrets ou binaires, ont deux positions, fermé - ouvert ou 1 et 0. En d'autres termes, vous pouvez dire qu'un événement s'est produit ou non. Dans l'exemple ci-dessus, plusieurs points sont « rattrapés » par les contacts : le début du mouvement, le point de décélération, la fin du mouvement. En géométrie, un point n'a pas de dimensions, juste un point et c'est tout. Elle peut être soit (sur une feuille de papier, dans la trajectoire, comme dans notre cas) soit elle n'existe tout simplement pas. Par conséquent, des capteurs discrets sont utilisés pour détecter des points. Il se peut qu'une comparaison avec un point ne soit pas très appropriée ici, car en pratique on utilise la valeur de la précision d'un capteur discret, et cette précision est bien supérieure à un point géométrique. Mais en soi, le contact mécanique est une chose peu fiable. Par conséquent, dans la mesure du possible, les contacts mécaniques sont remplacés par des capteurs sans contact. L'option la plus simple est les interrupteurs à lames : l'aimant se rapproche, le contact se ferme. La précision du fonctionnement de l'interrupteur à lames laisse beaucoup à désirer ; de tels capteurs ne sont utilisés que pour déterminer la position des portes. Une option plus complexe et précise devrait être considérée comme divers capteurs sans contact. Si le drapeau métallique est entré dans la fente, le capteur a fonctionné. Des capteurs BVK (Proximity Limit Switch) de différentes séries peuvent être cités comme exemple de tels capteurs. La précision de réponse (différentiel de course) de ces capteurs est de 3 millimètres.
Figure 1. Capteur série BVK La tension d'alimentation des capteurs BVK est de 24V, le courant de charge est de 200mA, ce qui est tout à fait suffisant pour connecter des relais intermédiaires pour une coordination plus poussée avec le circuit de commande. C'est ainsi que les capteurs BVK sont utilisés dans divers équipements. En plus des capteurs BVK, des capteurs de types BTP, KVP, PIP, KVD, PISCH sont également utilisés. Chaque série comporte plusieurs types de capteurs, indiqués par des numéros, par exemple, BTP-101, BTP-102, BTP-103, BTP-211. Tous les capteurs mentionnés sont discrets sans contact, leur objectif principal est de déterminer la position de pièces de mécanismes et d'assemblages. Naturellement, il existe de nombreux autres capteurs de ce type ; il est impossible de les décrire tous dans un seul article. Divers capteurs de contact sont encore plus courants et encore largement utilisés. Application de capteurs analogiques Outre les capteurs discrets, les capteurs analogiques sont largement utilisés dans les systèmes d'automatisation. Leur but est d'obtenir des informations sur diverses grandeurs physiques, et pas seulement comme ça en général, mais en temps réel. Plus précisément, la conversion d'une grandeur physique (pression, température, éclairement, débit, tension, courant) en un signal électrique apte à être transmis via des lignes de communication au contrôleur et son traitement ultérieur. Les capteurs analogiques sont généralement situés assez loin du contrôleur, c'est pourquoi ils sont souvent appelés appareils de terrain. Ce terme est souvent utilisé dans la littérature technique. Un capteur analogique se compose généralement de plusieurs parties. La partie la plus importante est l'élément sensible - capteur. Son but est de convertir la valeur mesurée en un signal électrique. Mais le signal reçu du capteur est généralement faible. Pour obtenir un signal adapté à l'amplification, le capteur est le plus souvent inclus dans un montage en pont - Pont de Wheatstone.
Figure 2. Pont de Wheatstone Le but initial du circuit en pont est de mesurer avec précision la résistance. Une source CC est connectée à la diagonale du pont AD. Un galvanomètre sensible avec un point médian, avec zéro au milieu de l'échelle, est connecté à l'autre diagonale. Pour mesurer la résistance de la résistance Rx en faisant tourner la résistance d'accord R2, le pont doit être équilibré, l'aiguille du galvanomètre doit être réglée sur zéro. La déviation de la flèche de l'appareil dans un sens ou dans l'autre permet de déterminer le sens de rotation de la résistance R2. La valeur de la résistance mesurée est déterminée par l'échelle, combinée avec la poignée de la résistance R2. La condition d'équilibre du pont est l'égalité des rapports R1/R2 et Rx/R3. Dans ce cas, une différence de potentiel nulle est obtenue entre les points BC et aucun courant ne traverse le galvanomètre V. La résistance des résistances R1 et R3 est sélectionnée très précisément, leur propagation doit être minimale. Seulement dans ce cas, même un petit déséquilibre du pont provoque un changement assez notable de la tension de la diagonale BC. C'est cette propriété du pont qui est utilisée pour connecter des éléments sensibles (capteurs) de divers capteurs analogiques. Eh bien, tout est simple, une question de technologie. Pour utiliser le signal reçu du capteur, son traitement ultérieur est nécessaire, - amplification et conversion en un signal de sortie apte à être transmis et traité par le circuit de commande - manette. Le plus souvent, le signal de sortie des capteurs analogiques est en courant (boucle de courant analogique), moins souvent en tension. Pourquoi courant ? Le fait est que les étages de sortie des capteurs analogiques sont basés sur des sources de courant. Cela vous permet de vous débarrasser de l'influence de la résistance des lignes de connexion sur le signal de sortie, d'utiliser des lignes de connexion de grande longueur. La transformation ultérieure est assez simple. Le signal de courant est converti en tension, pour laquelle il suffit de faire passer le courant à travers une résistance de résistance connue. La chute de tension aux bornes de la résistance de mesure est obtenue selon la loi d'Ohm U=I*R. Par exemple, pour un courant de 10 mA aux bornes d'une résistance de 100 Ohm, la tension sera de 10 * 100 = 1000 mV, soit au total 1 volt ! Dans ce cas, le courant de sortie du capteur ne dépend pas de la résistance des fils de connexion. Dans des limites raisonnables, bien sûr. Connexion de capteurs analogiques La tension obtenue sur la résistance de mesure est facilement convertie en une forme numérique adaptée à l'entrée dans le contrôleur. La conversion se fait avec convertisseurs analogique-numérique ADC. Les données numériques sont transmises au contrôleur en code série ou parallèle. Tout dépend du schéma de commutation spécifique. Un schéma simplifié de connexion du capteur analogique est illustré à la Figure 3. Figure 3. Connexion d'un capteur analogique (cliquez sur l'image pour l'agrandir) Les actionneurs sont connectés au contrôleur, ou le contrôleur lui-même est connecté à un ordinateur inclus dans le système d'automatisation. Naturellement, les capteurs analogiques ont une conception complète, dont l'un des éléments est un boîtier avec des éléments de connexion. A titre d'exemple, la figure 4 montre l'aspect du capteur de surpression de type Zond-10.
Figure 4. Capteur de surpression Zond-10 Au bas du capteur, vous pouvez voir le fil de connexion pour la connexion au pipeline, et à droite, sous le couvercle noir, il y a un connecteur pour connecter la ligne de communication au contrôleur. La connexion filetée est scellée avec une rondelle en cuivre recuit (fournie avec le capteur), et en aucun cas avec du fum-tape ou du lin. Ceci est fait pour que lors de l'installation du capteur, l'élément de capteur situé à l'intérieur ne soit pas déformé. Sorties de capteur analogiques Selon les normes, il existe trois gammes de signaux de courant : 0…5mA, 0…20mA et 4…20mA. Quelle est leur différence et quelles fonctionnalités ? Le plus souvent, la dépendance du courant de sortie est directement proportionnelle à la valeur mesurée, par exemple, plus la pression dans le tuyau est élevée, plus le courant à la sortie du capteur est important. Bien que parfois une connexion inverse soit utilisée : une valeur plus grande du courant de sortie correspond à la valeur minimale de la valeur mesurée à la sortie du capteur. Tout dépend du type de contrôleur utilisé. Certains capteurs ont même une commutation du signal direct au signal inverse. Le signal de sortie dans la plage 0...5mA est très faible et donc sensible aux interférences. Si le signal d'un tel capteur fluctue avec une valeur constante du paramètre mesuré, il est recommandé d'installer un condensateur d'une capacité de 0,1 ... 1 μF en parallèle avec la sortie du capteur. Plus stable est le signal de courant dans la plage de 0…20mA. Mais ces deux plages ne sont pas bonnes car zéro au début de l'échelle ne vous permet pas de déterminer sans ambiguïté ce qui s'est passé. Ou le signal mesuré a-t-il réellement pris un niveau zéro, ce qui est en principe possible, ou la ligne de communication s'est-elle simplement cassée ? Par conséquent, ils essaient de refuser l'utilisation de ces gammes, si possible. Le signal des capteurs analogiques avec un courant de sortie dans la plage de 4 ... 20 mA est considéré comme plus fiable. Son immunité au bruit est assez élevée, et la limite inférieure, même si le signal mesuré a un niveau nul, sera de 4mA, ce qui nous permet de dire que la ligne de communication n'est pas coupée. Une autre bonne caractéristique de la gamme 4 ... 20mA est que les capteurs peuvent être connectés avec seulement deux fils, car le capteur lui-même est alimenté par ce courant. C'est son courant de consommation et en même temps un signal de mesure. L'alimentation des capteurs dans la plage 4 ... 20 mA est activée, comme illustré à la figure 5. Dans le même temps, les capteurs Zond-10, comme beaucoup d'autres, selon le passeport, ont une large plage de tension d'alimentation de 10 ... 38V, bien qu'ils soient le plus souvent utilisés avec une tension de 24V.
Figure 5. Connexion d'un capteur analogique avec une alimentation externe Ce schéma contient les éléments et symboles suivants. Rsh - résistance shunt de mesure, Rl1 et Rl2 - résistances des lignes de communication. Pour améliorer la précision de la mesure, une résistance de mesure de précision doit être utilisée comme Rsh. Le passage du courant de l'alimentation est indiqué par des flèches. Il est facile de voir que le courant de sortie de l'alimentation passe de la borne +24V, à travers la ligne Rl1 atteint la borne du capteur +AO2, passe à travers le capteur et à travers le contact de sortie du capteur - AO2, la ligne de connexion Rl2, le la résistance Rsh revient sur la borne d'alimentation -24V. Tout, le circuit est fermé, le courant passe. Si le contrôleur contient une alimentation 24 V, la connexion d'un capteur ou d'un transducteur de mesure est possible selon le schéma illustré à la Figure 6.
Figure 6. Connexion d'un capteur analogique à un contrôleur avec une alimentation interne Ce diagramme montre un autre élément - une résistance de ballast Rb. Son but est de protéger la résistance de mesure en cas de court-circuit dans la ligne de communication ou de dysfonctionnement du capteur analogique. L'installation d'une résistance Rb est facultative, bien que souhaitable. En plus de divers capteurs, la sortie courant dispose également de transducteurs de mesure, qui sont assez souvent utilisés dans les systèmes d'automatisation. Transducteur de mesure- un appareil pour convertir des niveaux de tension, par exemple 220V ou un courant de plusieurs dizaines ou centaines d'ampères en un signal de courant de 4 ... 20mA. Ici, le niveau du signal électrique est simplement converti, et non la représentation d'une grandeur physique (vitesse, débit, pression) sous forme électrique. Mais la question, en règle générale, ne suffit pas avec un seul capteur. Certaines des mesures les plus populaires sont les mesures de température et de pression. Le nombre de ces points dans la production moderne peut atteindre plusieurs dizaines de milliers. En conséquence, le nombre de capteurs est également important. Par conséquent, plusieurs capteurs analogiques sont le plus souvent connectés à un contrôleur à la fois. Bien sûr, pas plusieurs milliers à la fois, c'est bien si une douzaine est différente. Une telle connexion est illustrée à la figure 7.
Figure 7. Connexion de plusieurs capteurs analogiques au contrôleur Cette figure montre comment une tension est obtenue à partir d'un signal de courant, apte à être converti en un code numérique. S'il existe plusieurs signaux de ce type, ils ne sont pas traités en même temps, mais sont séparés dans le temps, multiplexés, sinon un ADC séparé devrait être installé sur chaque canal. A cet effet, le contrôleur dispose d'un circuit de commutation de circuit. Le schéma fonctionnel de l'interrupteur est illustré à la figure 8.
Figure 8. Commutateur de canal de capteur analogique (image cliquable) Les signaux de la boucle de courant convertis en tension aux bornes de la résistance de mesure (UR1…URn) sont envoyés à l'entrée du commutateur analogique. Les signaux de commande font alternativement passer en sortie l'un des signaux UR1...URn, qui sont amplifiés par l'amplificateur, et sont alternativement amenés à l'entrée du CAN. La tension convertie en un code numérique est fournie au contrôleur. Le schéma, bien sûr, est très simplifié, mais il est tout à fait possible d'y envisager le principe du multiplexage. C'est approximativement ainsi que le module d'entrée des signaux analogiques des contrôleurs MCTS (système à microprocesseur des moyens techniques) produit par le PC "Prolog" de Smolensk est construit. L'apparence du contrôleur MCTS est illustrée à la Figure 9.
Figure 9. Contrôleur MSTS La sortie de tels contrôleurs a longtemps été interrompue, bien que dans certains endroits, loin d'être les meilleurs, ces contrôleurs soient toujours utilisés. Ces expositions de musée sont remplacées par des contrôleurs de nouveaux modèles, principalement de production importée (chinoise). Si le contrôleur est monté dans une armoire métallique, il est recommandé de connecter les tresse de blindage au point de masse de l'armoire. La longueur des lignes de raccordement peut atteindre plus de deux kilomètres, ce qui est calculé à l'aide des formules appropriées. Nous ne compterons rien ici, mais croyons qu'il en est ainsi. Nouveaux capteurs, nouveaux contrôleurs Avec l'avènement de nouveaux contrôleurs, nouveaux transmetteurs analogiques avec protocole HART(Transducteur à distance adressable par autoroute) Le signal de sortie du capteur (appareil de terrain) est un signal de courant analogique dans la plage de 4 ... 20 mA, auquel un signal de communication numérique modulé en fréquence (FSK - Frequency Shift Keying) est superposé.
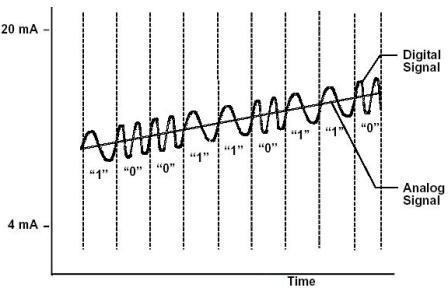
Figure 10. Sortie du transmetteur analogique HART La figure montre un signal analogique avec une sinusoïde qui s'enroule autour de lui comme un serpent. C'est le signal modulé en fréquence. Mais ce n'est pas du tout un signal numérique, il n'a pas encore été reconnu. On remarque sur la figure que la fréquence de la sinusoïde lors de la transmission d'un zéro logique est plus élevée (2,2 kHz) que lors de la transmission d'un (1,2 kHz). La transmission de ces signaux est réalisée par un courant d'amplitude ± 0,5 mA de forme sinusoïdale. On sait que la valeur moyenne du signal sinusoïdal est égale à zéro, par conséquent, la transmission d'informations numériques n'affecte pas le courant de sortie du capteur 4 ... 20mA. Ce mode est utilisé lors de la configuration des capteurs. La communication HART s'effectue de deux manières. Dans le premier cas, le standard, seuls deux appareils peuvent échanger des informations sur une ligne à deux fils, tandis que le signal analogique de sortie 4 ... 20mA dépend de la valeur mesurée. Ce mode est utilisé lors de la configuration des appareils de terrain (capteurs). Dans le second cas, jusqu'à 15 capteurs peuvent être connectés à une ligne à deux fils, dont le nombre est déterminé par les paramètres de la ligne de communication et la puissance de l'alimentation. C'est le mode multipoint. Dans ce mode, chaque capteur a sa propre adresse dans la plage 1…15, par laquelle le dispositif de contrôle y accède. Le capteur avec l'adresse 0 est déconnecté de la ligne de communication. L'échange de données entre le capteur et le dispositif de contrôle en mode multipoint s'effectue uniquement par un signal de fréquence. Le signal de courant du capteur est fixé au niveau requis et ne change pas. Les données dans le cas d'une communication multipoint signifient non seulement les résultats des mesures du paramètre contrôlé, mais également un ensemble complet d'informations de service de toutes sortes. Ce sont tout d'abord les adresses des capteurs, les commandes de contrôle, les réglages. Et toutes ces informations sont transmises sur des lignes de communication à deux fils. Est-il possible de s'en débarrasser également ? Certes, cela doit être fait avec précaution, uniquement dans les cas où la connexion sans fil ne peut pas affecter la sécurité du processus contrôlé. Il s'avère que vous pouvez vous débarrasser des fils. Déjà en 2007, la norme WirelessHART a été publiée, le support de transmission est la fréquence sans licence de 2,4 GHz, sur laquelle fonctionnent de nombreux appareils informatiques sans fil, y compris les réseaux locaux sans fil. Par conséquent, les appareils WirelessHART peuvent également être utilisés sans aucune restriction. La figure 11 illustre un réseau WirelessHART. Figure 11. Réseau sans fil HART Ce sont les technologies qui ont remplacé l'ancienne boucle de courant analogique. Mais il n'abandonne pas non plus ses positions, il est largement utilisé partout où cela est possible. |













Populaire:
Nouveau
- Germes : avantages, applications
- Les cinq gardes les plus célèbres d'Ivan le Terrible
- Mikhail Fedorovich Romanov: Tsar-"persil" Élection de Mikhail Romanov comme tsar russe
- Début de la dynastie Romanov
- Mikhail Fedorovich - biographie, informations, vie personnelle Mikhail Fedorovich Romanov
- Mikhaïl Fedorovitch Romanov
- Comment Scipion a vaincu Hannibal
- Publius Cornelius Scipio African Senior: biographie, photo
- Refus motivé d'un logement de service par des militaires Refus motivé d'un logement de service par des militaires
- Les spécificités de l'influence de la société sur une personne L'influence de la société sur le développement de la personnalité d'une personne




