Saidi jaotised
Toimetaja valik:
- Kuus näidet pädevast lähenemisest arvude käändele
- Talvise poeetilise tsitaadi nägu lastele
- Vene keele tund "pehme märk pärast susisevaid nimisõnu"
- Helde puu (mõistusõna) Kuidas jõuda õnneliku lõpuni muinasjutule „Helde puu”
- Tunniplaan meid ümbritsevast maailmast teemal “Millal tuleb suvi?
- Ida-Aasia: riigid, rahvastik, keel, religioon, ajalugu Olles vastane pseudoteaduslikele teooriatele inimrasside jagamise kohta madalamateks ja kõrgemateks, tõestas ta tõde
- Ajateenistuseks sobivuse kategooriate klassifikatsioon
- Pahatahtlik kokkupuude ja armee Pahatihti armeesse ei võeta
- Miks unistate elusast surnud emast: unenägude raamatute tõlgendused
- Milliste sodiaagimärkide all on aprillis sündinud?
Reklaam
| Punkti ja sirge kauguse mõiste. Kaugus punktist sirgjooneni tasapinnal ja ruumis: määratlus ja leidmise näited |
|
155*. Defineeri elusuurus sirge segment AB üldine seisukoht(joonis 153, a). Lahendus. Nagu teada, on sirgjoone segmendi projektsioon mis tahes tasapinnal võrdne lõigu endaga (võttes arvesse joonise mõõtkava), kui see on selle tasapinnaga paralleelne (joonis 153, b). Sellest järeldub, et joonise teisendamisega on vaja saavutada selle lõigu ruudu paralleelsus. V või ruut H või täiendada süsteemi V, H teise ruuduga risti oleva tasapinnaga. V või pl. H ja samal ajal paralleelselt selle segmendiga. Joonisel fig. 153, c näitab täiendava tasandi S sisseviimist, mis on ruuduga risti. H ja paralleelne etteantud lõiguga AB. Projektsioon a s b s on võrdne lõigu AB loomuliku väärtusega. Joonisel fig. 153, d näitab teist tehnikat: lõiku AB pööratakse ümber sirge, mis läbib punkti B ja on ruuduga risti. H, paralleelsesse asendisse pl. V. Sel juhul jääb punkt B oma kohale ja punkt A võtab uue positsiooni A 1. Horisont on uues asendis. projektsioon a 1 b || x telg Projektsioon a" 1 b" on võrdne lõigu AB loomuliku suurusega.  156. Antud püramiid SABCD (joon. 154). Määrake projektsioonitasandite muutmise meetodil püramiidi servade AS ja CS ning pööramise meetodil servade BS ja DS tegelik suurus ning võtke ruuduga risti olev pöörlemistelg. H. 157*. Määrake kaugus punktist A sirgjooneni BC (joonis 155, a). Lahendus. Kaugust punktist jooneni mõõdetakse punktist sirgele tõmmatud risti lõiguga. Kui sirge on mis tahes tasapinnaga risti (joonis 155.6), siis mõõdetakse punktist sirge kaugust punkti projektsiooni ja sellel tasapinnal oleva sirge punktprojektsiooni vahelise kaugusega. Kui sirgjoon on V, H süsteemis üldasendis, siis selleks, et määrata kaugust punktist sirgjooneni projektsioonitasapindade muutmisega, on vaja V, H süsteemi lisada kaks täiendavat tasandit. Kõigepealt (joonis 155, c) sisestame ruudu. S, paralleelne lõiguga BC (uus telg S/H on paralleelne projektsiooniga bc) ja koostada projektsioonid b s c s ja a s. Seejärel (joonis 155, d) tutvustame teist ruutu. T, risti sirgega BC (uus telg T/S on risti b s-ga s-ga). Ehitame sirge ja punkti projektsioonid t (b t) ja a t-ga. Punktide a t ja c t (b t) vaheline kaugus on võrdne kaugusega l punktist A kuni sirgeni BC. Joonisel fig. 155, d, sama ülesanne täidetakse, kasutades pöörlemismeetodit selle kujul, mida nimetatakse paralleelliikumise meetodiks. Esiteks pööratakse sirgjoont BC ja punkti A, jättes oma suhtelise asukoha muutumatuks, ümber mõne (joonisel pole näidatud) sirge, mis on ruuduga risti. H, nii et sirge BC on paralleelne ruuduga. V. See on samaväärne punktide A, B, C liigutamisega ruuduga paralleelsetel tasapindadel. H. Samas horisont. antud süsteemi projektsioon (BC + A) ei muutu ei suuruse ega konfiguratsiooni poolest, muutub ainult selle asend x-telje suhtes. Asetame horisondi. x-teljega paralleelse sirge BC projektsioon (asend b 1 c 1) ja määrake projektsioon a 1, jättes kõrvale c 1 1 1 = c-1 ja a 1 1 1 = a-1 ja a 1 1 1 ⊥ c 1 1 1. Joonistades x-teljega paralleelselt sirgeid b"b" 1 , a"a" 1 , c"c" 1, leiame nende pealt esiosa. projektsioonid b" 1, a" 1, c" 1. Järgmiseks nihutame punkte B 1, C 1 ja A 1 tasanditel, mis on paralleelsed alaga V (ka ilma nende suhtelist asukohta muutmata), et saada B 2 C 2 ⊥ ruut H. Sel juhul on sirge projektsioon esiosaga risti x,b teljed 2 c" 2 = b" 1 c" 1 ja projektsiooni a" 2 konstrueerimiseks tuleb võtta b" 2 2" 2 = b" 1 2" 1, joonistada 2"a" 2 ⊥ b" 2 c" 2 ja asetage kõrvale a" 2 2" 2 = a" 1 2" 1 . Nüüd, olles kulutanud 1-ga 2-ga ja 1-ga 2 || x 1 saame projektsioonid b 2 punktidest 2 ja a 2 ning soovitud kauguse l punktist A sirgjooneni BC. Vahemaa punktist A punktini BC saab määrata punkti A ja sirgjoonega BC määratletud tasapinna pööramisega ümber selle tasandi horisontaali asendisse T || pl. H (joonis 155, f). Punkti A ja sirgjoonega BC määratletud tasapinnal tõmmake horisontaaljoon A-1 (joonis 155, g) ja pöörake punkt B ümber selle. R (määratletud joonisel R h kõrval), risti A-1; punktis O on punkti B pöördekese. Nüüd määrame pöörderaadiuse VO loomuliku väärtuse (joon. 155, c). Vajalikus asendis, st kui pl. Punkti A ja sirgjoonega BC määratud T muutub || pl. H, punkt B asub Rh-l punktist O kaugusel Ob 1 (samal jäljel Rh võib olla teine asukoht, kuid teisel pool O). Punkt b 1 on horisont. punkti B projektsioon pärast selle viimist ruumis asendisse B 1, kui punkti A ja sirgjoonega BC määratletud tasapind on võtnud asendi T. Joonistades (joonis 155, i) sirge b 1 1, saame horisondi. juba paikneva sirge BC projektsioon || pl. H on A-ga samal tasapinnal. Selles asendis on kaugus a-st b 1 1 võrdne soovitud kaugusega l. Tasapinda P, milles antud elemendid asuvad, saab kombineerida ruuduga. H (joonis 155, j), pööramine ruut. R tema ümber on horisont. jälg. Liikudes tasapinna täpsustamiselt punkti A ja sirge BC järgi sirgete BC ja A-1 määramise juurde (joon. 155, l), leiame nende sirgete jäljed ja joonistame nende kaudu jäljed P ϑ ja P h. Ehitame (joon. 155, m) koos väljakuga. H asend ees. jälg - P ϑ0 . Punkti a kaudu joonistame horisondi. eesmine projektsioon; kombineeritud front läbib punkti 2 jäljel P h paralleelselt P ϑ0. Punkt A 0 - kombineeritud ruuduga. H on punkti A asukoht. Samamoodi leiame punkti B 0. Otsene päike kombineerituna ruuduga. H-asend läbib punkti B 0 ja punkti m (sirge horisontaalne jälg). Kaugus punktist A 0 sirgeni B 0 C 0 on võrdne nõutava kaugusega l. Näidatud konstruktsiooni saate teostada, leides ainult ühe jälje P h-st (joonis 155, n ja o). Kogu konstruktsioon sarnaneb pöördele horisontaali ümber (vt joon. 155, g, c, i): jälg P h on üks horisontaalidest pl. R. Selle probleemi lahendamiseks antud joonise teisendamise meetoditest on eelistatud meetodiks pööramine ümber horisontaalse või frontaalse. 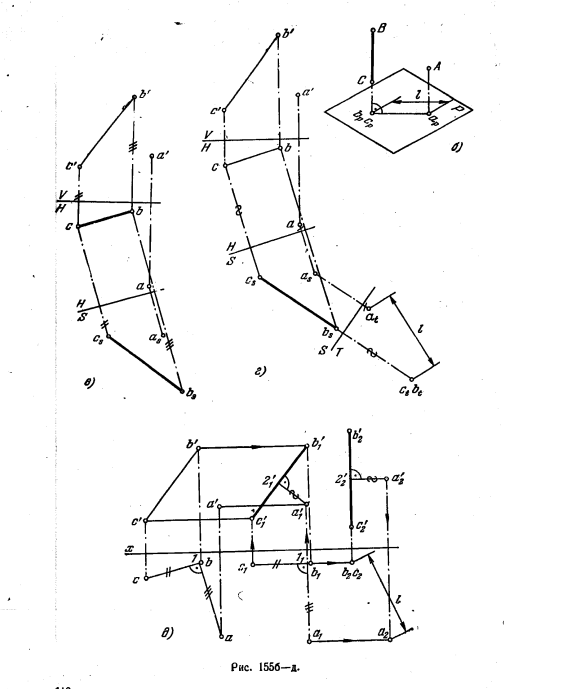  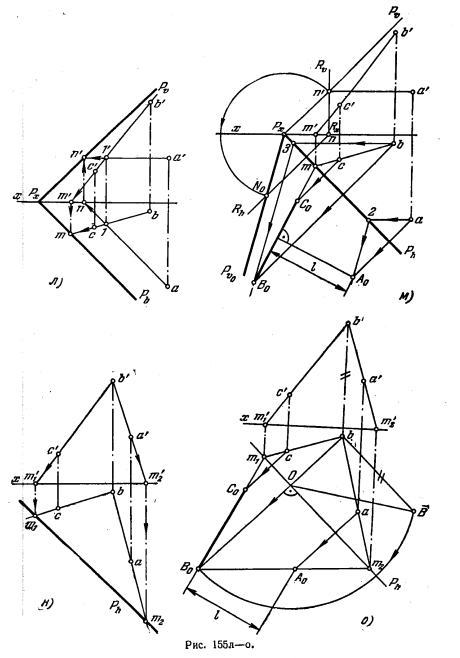 158. SABC püramiid on antud (joonis 156). Määrake vahemaad: a) aluse ülaosast B selle küljele AC paralleelse liikumise meetodil; b) püramiidi tipust S aluse külgedele BC ja AB, pöörates ümber horisontaali; c) ülaosast S aluse külgmisele AC-le projektsioonitasapindu muutes.  159. Prisma on antud (joon. 157). Määrake vahemaad: a) ribide AD ja CF vahel projektsioonitasapindade muutmisega; b) ribide BE ja CF vahel, pöörates ümber esiosa; c) servade AD ja BE vahel paralleelse liikumisega. 160. Määrake nelinurga ABCD tegelik suurus (joonis 158), joondades selle ruuduga. N. Kasutage ainult tasapinna horisontaalset jälge. 161*. Määrake ristumissirgete AB ja CD vaheline kaugus (joon. 159, a) ja koostage neile ühise risti projektsioonid. Lahendus. Ristmisjoonte kaugust mõõdetakse mõlema joonega risti oleva segmendiga (MN) (joonis 159, b). Ilmselgelt, kui üks sirgjoontest asetatakse mis tahes ruuduga risti. T siis 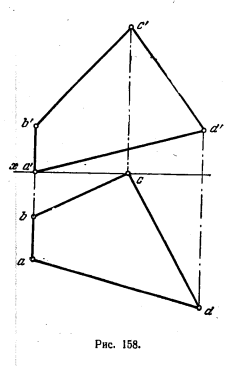  mõlema sirgega risti olev segment MN on ruuduga paralleelne. Selle projektsioon sellel tasapinnal kuvab vajaliku kauguse. Projektsioon täisnurk Menad MN n AB on pl. T osutub ka täisnurgaks m t n t ja a t b t vahel, kuna täisnurga üks külgedest on AMN, nimelt MN. paralleelselt ruuduga T. Joonisel fig. 159, c ja d, nõutav kaugus l määratakse projektsioonitasandite muutmise meetodil. Kõigepealt tutvustame täiendavat ruutu. projektsioonid S, ruuduga risti. H ja paralleelselt sirgjoonega CD (joonis 159, c). Seejärel tutvustame veel ühte täiendavat ruutu. T, ruuduga risti. S ja risti sama sirgjoonega CD (joonis 159, d). Nüüd saate koostada üldristi projektsiooni, tõmmates projektsiooniga a t b t risti olevast punktist c t (d t) m t n t. Punktid m t ja n t on selle ristsirgete AB ja CD lõikepunktide projektsioonid. Kasutades punkti m t (joonis 159, e) leiame m s a s b s: m s n s projektsioon peaks olema paralleelne T/S teljega. Järgmisena leiame m s-st ja n s-st m ja n ab ja cd peal ning neist m" ja n" a"b" ja c"d peal". Joonisel fig. 159, c näitab selle probleemi lahendust paralleelsete liikumiste meetodil. Kõigepealt asetame sirge CD ruuduga paralleelselt. V: projektsioon c 1 d 1 || X. Järgmisena liigutame sirgjooned CD ja AB positsioonidest C 1 D 1 ja A 1 B 1 positsioonidesse C 2 B 2 ja A 2 B 2 nii, et C 2 D 2 on risti H-ga: projektsioon c" 2 d" 2 ⊥ x. Vajaliku risti lõik asub || pl. H ja seetõttu väljendab m 2 n 2 soovitud kaugust l AB ja CD vahel. Leiame projektsioonide m" 2 ja n" 2 asukoha punktidel a" 2 b" 2 ja c" 2 d" 2, seejärel projektsioonid m 1 ja m" 1, n 1 ja n" 1, lõpuks projektsioonid m" ja n", m ja n.  162. SABC püramiid on antud (joonis 160). Määrake püramiidi aluse serva SB ja külje AC vaheline kaugus ning koostage projektsioonitasandite muutmise meetodil SB ja AC ühisristi projektsioonid.  163. SABC püramiid on antud (joonis 161). Määrake püramiidi aluse serva SH ja külje BC vaheline kaugus ning koostage paralleelnihke meetodil SX ja BC ühisristi projektsioonid. 164*. Määrake kaugus punktist A tasapinnani juhtudel, kui tasapind on määratud: a) kolmnurgaga BCD (joon. 162, a); b) jäljed (joon. 162, b). Lahendus. Nagu teate, mõõdetakse kaugust punktist tasapinnani punktist tasapinnale tõmmatud risti väärtusega. See kaugus projitseeritakse mis tahes alale. projektsioonid täissuuruses, kui see tasapind on ruuduga risti. projektsioonid (joonis 162, c). Selle olukorra saab saavutada joonise muutmisega, näiteks ala muutmisega. prognoosid. Tutvustame pl. S (joonis 16c, d), ruuduga risti. kolmnurk BCD. Selleks kulutame väljakul. kolmnurk horisontaalselt B-1 ja asetage projektsioonitelg S projektsiooniga b-1 risti horisontaalselt. Ehitame punkti ja tasandi projektsioonid - a s ja lõigu c s d s. Kaugus a s kuni c s d s võrdub punkti soovitud kaugusega l tasapinnast. 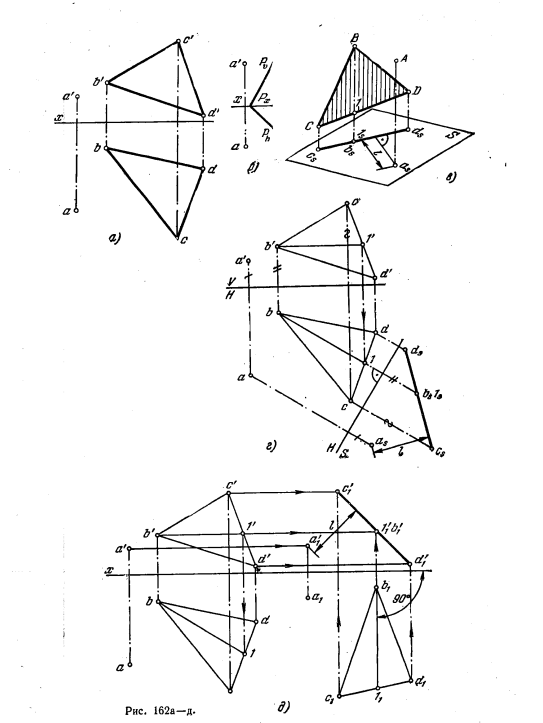 Riosse. 162, d kasutatakse paralleelliikumise meetodit. Liigutame kogu süsteemi, kuni horisontaaltasapind B-1 muutub risti tasapinnaga V: projektsioon b 1 1 1 peaks olema risti x-teljega. Selles asendis muutub kolmnurga tasand frontaalselt eenduvaks ja kaugus punktist A selleni on pl. V ilma moonutusteta.  Joonisel fig. 162, b tasapind on määratletud jälgedega. Tutvustame (joonis 162, e) täiendavat ruutu. S, ruuduga risti. P: S/H telg on P h-ga risti. Ülejäänu selgub jooniselt. Joonisel fig. 162, g probleem lahendati ühe liigutusega: pl. P läheb asendisse P 1, st muutub eest eenduvaks. Rada. P 1h on risti x-teljega. Sellesse lennuki asendisse ehitame esiosa. horisontaalne jälg on punkt n" 1, n 1. Jlg P 1ϑ läbib punkte P 1x ja n 1. Kaugus a" 1-st kuni P 1ϑ on võrdne nõutava vahemaaga l. 165. SABC püramiid on antud (vt joonis 160). Määrake paralleelliikumise meetodil kaugus punktist A SBC püramiidi servani. 166. SABC püramiid on antud (vt joonis 161). Määrake püramiidi kõrgus paralleelnihke meetodil. 167*. Määrake ristumisjoonte AB ja CD vaheline kaugus (vt joonis 159,a) kui läbi nende sirgete tõmmatud paralleeltasandite vaheline kaugus.  Lahendus. Joonisel fig. 163 ning tasapinnad P ja Q on üksteisega paralleelsed, millest pl. Q tõmmatakse läbi CD paralleelselt AB-ga ja pl. P - läbi AB paralleelselt ruuduga. K. Selliste tasandite vaheliseks kauguseks loetakse sirgete AB ja CD ristumiskaugust. Kuid võite piirduda ainult ühe tasandi, näiteks Q, konstrueerimisega, mis on paralleelne AB-ga, ja seejärel määrata kaugus vähemalt punktist A selle tasandini. Joonisel fig. 163, c näitab tasapinda Q, mis on tõmmatud läbi CD paralleelselt AB-ga; e-ga tehtud prognoosides || a"b" ja ce || ab. Kasutades pl. projektsioonid (joonis 163, c), tutvustame täiendavat ruutu. S, ruuduga risti. V ja samal ajal  ruuduga risti K. S/V-telje joonistamiseks võtke sellel tasapinnal esiosa D-1. Nüüd joonistame S/V risti d"1"-ga (joonis 163, c). Pl. Q on väljakul kujutatud. S sirgjoonena s d s-ga. Ülejäänu selgub jooniselt. 168. SABC püramiid on antud (vt joonis 160). Määrake ribide SC ja AB vaheline kaugus Rakendage: 1) pindala muutmise meetodit. projektsioonid, 2) paralleelliikumise meetod. 169*. Määrake paralleelsete tasapindade vaheline kaugus, millest üks on määratletud sirgjoontega AB ja AC ning teine sirgjoontega DE ja DF (joonis 164, a). Tehke ehitus ka juhuks, kui tasapinnad on määratud jälgedega (joon. 164, b). Lahendus. Paralleelsete tasandite vahelise kauguse (joonis 164, c) saab määrata, tõmmates ühe tasapinna mis tahes punktist teise tasandisse risti. Joonisel fig. 164, g lisati täiendav ruut. S risti ruuduga. H ja mõlemale antud tasapinnale. S.H-telg on horisontaaltasandiga risti. ühes tasapinnas tõmmatud horisontaalprojektsioon. Konstrueerime ruudule selle tasandi projektsiooni ja punkti teisele tasapinnale. 5. Punkti d s kaugus sirgest l s a s on võrdne paralleelsete tasapindade vahelise nõutava kaugusega. Joonisel fig. 164, d on antud teine konstruktsioon (vastavalt paralleelliikumise meetodile). Selleks, et ristuvate sirgete AB ja AC poolt väljendatud tasapind oleks ruuduga risti. V, horisont. Seadsime selle tasandi horisontaalprojektsiooni risti x-teljega: 1 1 2 1 ⊥ x. Esiosa vaheline kaugus. punkti D projektsioon d" 1 ja sirge a" 1 2" 1 (tasapinna esiprojektsioon) võrdub nõutava tasanditevahelise kaugusega.   Joonisel fig. 164, e näitab lisaruudu sisseviimist. S, risti pindalaga H ning antud tasanditega P ja Q (S/H telg on risti jälgedega P h ja Q h). Ehitame P s ja Q s jäljed. Nende vaheline kaugus (vt joonis 164, c) võrdub soovitud kaugusega l tasapindade P ja Q vahel. Joonisel fig. 164, g näitab tasandite P 1 n Q 1 liikumist positsioonidesse P 1 ja Q 1, kui horisont. jäljed osutuvad risti x-teljega. Uute rinnete vaheline kaugus. jäljed P 1ϑ ja Q 1ϑ on võrdsed nõutava vahemaaga l. 170. Antud rööptahukas ABCDEFGH (joon. 165). Määrake kaugused: a) rööptahuka aluste vahel - l 1; b) pindade vahel ABFE ja DCGH - l 2; c) ADHE ja BCGF-l pindade vahel 3. See artikkel räägib teemast « kaugus punktist jooneni », Arutab illustreeritud näidetega koordinaatide meetodil punkti ja sirge kauguse määratlust. Iga teooriaplokk lõpus on näidanud näiteid sarnaste probleemide lahendamisest. Yandex.RTB R-A-339285-1 Kaugus punktist jooneni leitakse punktist punkti kauguse määramisega. Vaatame lähemalt. Olgu sirge a ja punkt M 1, mis antud sirgele ei kuulu. Selle kaudu tõmbame sirge b, mis asub risti sirgjoonega a. Võtame sirgete lõikepunktiks H 1. Saame, et M 1 H 1 on risti, mis langetati punktist M 1 sirgele a. Definitsioon 1 Kaugus punktist M 1 sirgjooneni a nimetatakse kauguseks punktide M 1 ja H 1 vahel. On definitsioone, mis sisaldavad risti pikkust. 2. definitsioon Kaugus punktist jooneni on antud punktist antud sirgele tõmmatud risti pikkus. Definitsioonid on samaväärsed. Mõelge allolevale joonisele. On teada, et punkti ja joone vaheline kaugus on väikseim võimalikest. Vaatame seda näitega. Kui võtta punkt Q, mis asub sirgel a, mis ei lange kokku punktiga M 1, siis leiame, et lõiku M 1 Q nimetatakse kaldlõiguks, mis on langetatud M 1-lt sirgele a. On vaja näidata, et risti punktist M 1 on väiksem kui mis tahes muust punktist sirgele tõmmatud kaldjoon. Selle tõestamiseks vaatleme kolmnurka M 1 Q 1 H 1, kus M 1 Q 1 on hüpotenuus. On teada, et selle pikkus on alati suurem kui mõne jala pikkus. See tähendab, et meil on M 1 H 1< M 1 Q . Рассмотрим рисунок, приведенный ниже.
Punktist joonele leidmise lähteandmed võimaldavad kasutada mitmeid lahendusviise: Pythagorase teoreemi kaudu siinuse, koosinuse, nurga puutuja jt määramine. Enamik seda tüüpi ülesandeid lahendatakse koolis geomeetriatundides. Kui punkti ja sirge kauguse leidmisel on võimalik kasutusele võtta ristkülikukujuline koordinaatsüsteem, siis kasutatakse koordinaatmeetodit. Selles lõigus käsitleme kahte peamist meetodit vajaliku kauguse leidmiseks antud punktist. Esimene meetod hõlmab kauguse otsimist risti, mis on tõmmatud punktist M 1 sirgjooneni a. Teine meetod kasutab vajaliku kauguse leidmiseks sirge a tavavõrrandit. Kui tasapinnal on punkt koordinaatidega M 1 (x 1, y 1), mis asub ristkülikukujulises koordinaatsüsteemis, sirge a ja peate leidma kauguse M 1 H 1, saate arvutuse teha kahes viise. Vaatame neid. Esimene viis Kui punkti H 1 koordinaadid on võrdsed x 2, y 2, siis kaugus punktist sirgeni arvutatakse koordinaatide abil valemist M 1 H 1 = (x 2 - x 1) 2 + (y 2) - y 1) 2. Liigume nüüd edasi punkti H 1 koordinaatide leidmise juurde. On teada, et sirge O x y-s vastab tasapinna sirgjoone võrrandile. Võtame sirge a määramise meetodi kirjutamise teel üldvõrrand sirgjoone või kalde võrrandid. Koostame võrrandi sirgest, mis läbib punkti M 1 risti antud sirgega a. Tähistame sirget tähega b. H 1 on joonte a ja b lõikepunkt, mis tähendab, et koordinaatide määramiseks peate kasutama artiklit, milles me räägime kahe sirge lõikepunktide koordinaatide kohta. On näha, et antud punktist M 1 (x 1, y 1) sirge a kauguse leidmise algoritm viiakse läbi punktide järgi: 3. määratlus
Teine viis Teoreem võib aidata vastata küsimusele, kuidas leida kaugus antud punktist antud tasapinna sirgjooneni. Teoreem Ristkülikukujulises koordinaatsüsteemis O x y on punkt M 1 (x 1, y 1), millest tõmmatakse tasapinna normaalvõrrandiga antud tasapinnale sirge kujuga cos α x + cos β y - p = 0, võrdne sirge normaalvõrrandi vasakul küljel saadud absoluutväärtus, mis arvutatakse x = x 1, y = y 1, tähendab, et M 1 H 1 = cos α · x 1 + cos β · y 1 - lk. Tõestus Sirge a vastab tasapinna normaalvõrrandile kujul cos α x + cos β y - p = 0, siis loetakse n → = (cos α, cos β) joone a normaalvektoriks, mis asub joonest eemal. lähtepunkt, et rida a p ühikuga . Joonisel on vaja kuvada kõik andmed, lisada punkt koordinaatidega M 1 (x 1, y 1), kus punkti raadiuse vektor M 1 - O M 1 → = (x 1, y 1). Punktist sirgele on vaja tõmmata sirge, mida tähistame kui M 1 H 1 . Vaja on näidata punktide M 1 ja H 2 projektsioonid M 2 ja H 2 punkti O läbivale sirgele suunavektoriga kujul n → = (cos α, cos β) ja tähistada vektori kui O M 1 → = (x 1, y 1) arvprojektsioon suunas n → = (cos α , cos β) kui n p n → O M 1 → . Variatsioonid sõltuvad punkti M1 asukohast. Vaatame allolevat joonist.
Fikseerime tulemused valemiga M 1 H 1 = n p n → O M → 1 - p. Seejärel toome võrdsuse kujule M 1 H 1 = cos α · x 1 + cos β · y 1 - p, et saada n p n → O M → 1 = cos α · x 1 + cos β · y 1 . Vektorite skalaarkorrutis annab tulemuseks teisendatud valemi kujul n → , O M → 1 = n → · n p n → O M 1 → = 1 · n p n → O M 1 → = n p n → O M 1 → , mis on korrutis koordinaatide kujul kujul n → , O M 1 → = cos α · x 1 + cos β · y 1 . See tähendab, et saame, et n p n → O M 1 → = cos α · x 1 + cos β · y 1 . Sellest järeldub, et M 1 H 1 = n p n → O M 1 → - p = cos α · x 1 + cos β · y 1 - p. Teoreem on tõestatud. Leiame, et kauguse leidmiseks punktist M 1 (x 1, y 1) tasapinna sirgjooneni a peate tegema mitu toimingut: 4. definitsioon
Rakendame neid meetodeid punkti ja tasapinna kauguse leidmise probleemide lahendamiseks. Näide 1 Leidke kaugus punktist koordinaatidega M 1 (- 1, 2) sirgjooneni 4 x - 3 y + 35 = 0. Lahendus Kasutame lahendamiseks esimest meetodit. Selleks on vaja leida sirge b üldvõrrand, mis läbib antud punkti M 1 (- 1, 2), mis on risti sirgega 4 x - 3 y + 35 = 0. Tingimusest on selge, et sirge b on risti sirgega a, siis selle suunavektori koordinaadid on võrdsed (4, - 3). Seega on meil võimalus tasapinnale üles kirjutada sirge b kanooniline võrrand, kuna seal on sirgele b kuuluva punkti M 1 koordinaadid. Määrame sirge b suunavektori koordinaadid. Saame, et x - (- 1) 4 = y - 2 - 3 ⇔ x + 1 4 = y - 2 - 3. Saadud kanooniline võrrand tuleb teisendada üldiseks võrrandiks. Siis me saame selle x + 1 4 = y - 2 - 3 ⇔ - 3 · (x + 1) = 4 · (y - 2) ⇔ 3 x + 4 y - 5 = 0 Leiame sirgete lõikepunktide koordinaadid, mida võtame tähiseks H 1. Teisendused näevad välja sellised: 4 x - 3 a + 35 = 0 3 x + 4 a - 5 = 0 ⇔ x = 3 4 a - 35 4 3 x + 4 a - 5 = 0 ⇔ x = 3 4 a - 35 4 3 3 4 a - 35 4 + 4 a - 5 = 0 ⇔ ⇔ x = 3 4 a - 35 4 a = 5 ⇔ x = 3 4 5 - 35 4 a = 5 ⇔ x = - 5 a = 5 Eespool kirjutatu põhjal saame, et punkti H 1 koordinaadid on võrdsed (- 5; 5). On vaja arvutada kaugus punktist M 1 sirgjooneni a. Meil on, et punktide M 1 (- 1, 2) ja H 1 (- 5, 5) koordinaadid, siis asendame need valemis, et leida kaugus ja saada see M 1 H 1 = (- 5 - (- 1) 2 + (5 - 2) 2 = 25 = 5 Teine lahendus. Teisel viisil lahendamiseks on vaja saada sirge normaalvõrrand. Arvutame normaliseeriva teguri väärtuse ja korrutame võrrandi mõlemad pooled 4 x - 3 y + 35 = 0. Siit saame, et normaliseeriv tegur on võrdne - 1 4 2 + (- 3) 2 = - 1 5 ja normaalvõrrand on kujul - 1 5 4 x - 3 y + 35 = - 1 5 0 ⇔ - 4 5 x + 3 5 a - 7 = 0 . Arvutusalgoritmi kohaselt on vaja saada sirge normaalvõrrand ja arvutada see väärtustega x = - 1, y = 2. Siis me saame selle 4 5 · - 1 + 3 5 · 2 - 7 = - 5 Sellest saame, et kaugus punktist M 1 (- 1, 2) antud sirgeni 4 x - 3 y + 35 = 0 on väärtusega - 5 = 5. Vastus: 5 . On näha, et selle meetodi puhul on oluline kasutada sirge normaalvõrrandit, kuna see meetod on kõige lühem. Kuid esimene meetod on mugav, kuna see on järjepidev ja loogiline, kuigi sellel on rohkem arvutuspunkte. Näide 2 Tasapinnal on ristkülikukujuline koordinaatsüsteem O x y punktiga M 1 (8, 0) ja sirgjoonega y = 1 2 x + 1. Leia kaugus antud punktist sirgjooneni. Lahendus Esimesel viisil lahendamine hõlmab antud võrrandi taandamist võrrandi kaldega üldine vaade. Asjade lihtsustamiseks saate seda teha teisiti. Kui risti asetsevate sirgjoonte nurkkoefitsientide korrutis on -1, siis kalle antud joonega risti olev sirge y = 1 2 x + 1 väärtus on 2. Nüüd saame võrrandi sirgest, mis läbib punkti koordinaatidega M 1 (8, 0). Meil on, et y - 0 = - 2 · (x - 8) ⇔ y = - 2 x + 16 . Jätkame punkti H 1 koordinaatide leidmisega, see tähendab, et lõikepunktid y = - 2 x + 16 ja y = 1 2 x + 1. Koostame võrrandisüsteemi ja saame: y = 1 2 x + 1 y = - 2 x + 16 ⇔ y = 1 2 x + 1 1 2 x + 1 = - 2 x + 16 ⇔ y = 1 2 x + 1 x = 6 ⇔ ⇔ y = 1 2 · 6 + 1 x = 6 = y = 4 x = 6 ⇒ H 1 (6, 4) Sellest järeldub, et kaugus punktist koordinaatidega M 1 (8, 0) sirgjooneni y = 1 2 x + 1 on võrdne kaugusega alguspunktist ja lõpp-punktist koordinaatidega M 1 (8, 0) ja H1 (6, 4). Arvutame ja leiame, et M 1 H 1 = 6 - 8 2 + (4 - 0) 2 20 = 2 5. Teisel viisil on lahendus liikuda koefitsiendiga võrrandilt selle normaalkujule. See tähendab, et saame y = 1 2 x + 1 ⇔ 1 2 x - y + 1 = 0, siis normaliseeriva teguri väärtus on - 1 1 2 2 + (- 1) 2 = - 2 5. Sellest järeldub, et sirge normaalvõrrand on kujul - 2 5 1 2 x - y + 1 = - 2 5 0 ⇔ - 1 5 x + 2 5 y - 2 5 = 0. Arvutame punktist M 1 8, 0 sirge kujuga - 1 5 x + 2 5 y - 2 5 = 0. Saame: M 1 H 1 = - 1 5 8 + 2 5 0 - 2 5 = - 10 5 = 2 5 Vastus: 2 5 . Näide 3 On vaja arvutada kaugus punktist koordinaatidega M 1 (- 2, 4) joonteni 2 x - 3 = 0 ja y + 1 = 0. Lahendus Saame sirge 2 x - 3 = 0 normaalkuju võrrandi: 2 x - 3 = 0 ⇔ 1 2 2 x - 3 = 1 2 0 ⇔ x - 3 2 = 0 Seejärel jätkame kauguse arvutamist punktist M 1 - 2, 4 sirgjooneni x - 3 2 = 0. Saame: M 1 H 1 = - 2 - 3 2 = 3 1 2 Sirge y + 1 = 0 võrrandil on normaliseeriv tegur väärtusega -1. See tähendab, et võrrand on kujul - y - 1 = 0. Jätkame kauguse arvutamisega punktist M 1 (- 2, 4) sirgjooneni - y - 1 = 0. Leiame, et see on võrdne - 4 - 1 = 5. Vastus: 3 1 2 ja 5. Vaatame lähemalt kauguse leidmist lennuki antud punktist kuni koordinaatteljed O x ja O y. Ristkülikukujulises koordinaatsüsteemis on O-teljel y sirge võrrand, mis on mittetäielik ja mille vorm on x = 0 ja O x - y = 0. Võrrandid on koordinaatide telgede jaoks normaalsed, siis on vaja leida kaugus punktist koordinaatidega M 1 x 1, y 1 joonteni. Seda tehakse valemite M 1 H 1 = x 1 ja M 1 H 1 = y 1 alusel. Vaatame allolevat joonist.
Näide 4 Leidke kaugus punktist M 1 (6, - 7) O x y tasapinnal paiknevate koordinaatjoonteni. Lahendus Kuna võrrand y = 0 on seotud sirgega O x, saame leida kauguse M 1 s antud koordinaadid, sellele sirgele, kasutades valemit. Saame, et 6 = 6. Kuna võrrand x = 0 viitab sirgele O y, saate valemi abil leida kauguse M 1 ja selle sirge vahel. Siis saame selle - 7 = 7. Vastus: kaugus M 1-st O x-ni on 6 ja M 1-st O y-ni väärtus 7. Kui kolmemõõtmelises ruumis on punkt koordinaatidega M 1 (x 1, y 1, z 1), on vaja leida kaugus punktist A sirgjooneni a. Vaatleme kahte meetodit, mis võimaldavad teil arvutada kaugust punktist ruumis asuva sirgjooneni a. Esimesel juhul võetakse arvesse kaugust punktist M 1 sirgeni, kus joone punkti nimetatakse H 1 ja see on punktist M 1 sirgele a tõmmatud risti alus. Teine juhtum viitab sellele, et rööpküliku kõrgusena tuleb otsida selle tasandi punkte. Esimene viis Definitsioonist saame, et kaugus sirgel a asuvast punktist M 1 on risti M 1 H 1 pikkus, siis saame selle punkti H 1 leitud koordinaatidega, siis leiame kauguse punkti M vahel. 1 (x 1, y 1, z 1) ja H 1 (x 1, y 1, z 1) põhinevad valemil M 1 H 1 = x 2 - x 1 2 + y 2 - y 1 2 + z 2 - z 1 2. Leiame, et kogu lahendus läheb M 1-lt sirgele a tõmmatud risti aluse koordinaatide leidmisele. Seda tehakse järgmiselt: H 1 on punkt, kus sirgjoon a lõikub antud punkti läbiva tasapinnaga.
See tähendab, et punktist M 1 (x 1, y 1, z 1) ruumis oleva jooneni a kauguse määramise algoritm hõlmab mitut punkti: Definitsioon 5
Teine viis Tingimusest on meil sirge a, siis saame määrata suunavektori a → = a x, a y, a z koordinaatidega x 3, y 3, z 3 ja kindla sirgele a kuuluva punktiga M 3. Kui teil on punktide M 1 (x 1, y 1) ja M 3 x 3, y 3, z 3 koordinaadid, saate arvutada M 3 M 1 →: M 3 M 1 → = (x 1 - x 3, y 1 - y 3, z 1 - z 3) Peaksime punktist M 3 kõrvale jätma vektorid a → = a x , a y , a z ja M 3 M 1 → = x 1 - x 3 , y 1 - y 3 , z 1 - z 3 , ühendama need ja saama rööpküliku kujund. M 1 H 1 on rööpküliku kõrgus. Vaatame allolevat joonist.
Meil on, et kõrgus M 1 H 1 on vajalik kaugus, siis on vaja see valemi abil leida. See tähendab, et me otsime M 1 H 1. Tähistame rööpküliku pindala tähega S, mis leitakse valemiga, kasutades vektorit a → = (a x, a y, a z) ja M 3 M 1 → = x 1 - x 3. y 1 - y 3, z 1 - z 3. Pindala valem on S = a → × M 3 M 1 → . Samuti võrdub joonise pindala selle külgede pikkuste ja kõrguse korrutisega, saame, et S = a → · M 1 H 1 koos a → = a x 2 + a y 2 + a z 2, mis on vektori a → = (a x, a y, a z) pikkus, mis on võrdne rööpküliku küljega. See tähendab, et M 1 H 1 on kaugus punktist sirgeni. See leitakse valemiga M 1 H 1 = a → × M 3 M 1 → a → . Et leida kaugust punktist koordinaatidega M 1 (x 1, y 1, z 1) ruumi sirgjooneni a, peate läbima mitu algoritmi sammu: Definitsioon 6
Antud punkti ja antud ruumi sirge kauguse leidmise ülesannete lahendamineNäide 5Leidke kaugus punktist koordinaatidega M 1 2, - 4, - 1 sirgeni x + 1 2 = y - 1 = z + 5 5. Lahendus Esimene meetod algab M 1 läbiva ja antud punktiga risti oleva tasandi χ võrrandi kirjutamisega. Saame väljendi nagu: 2 (x - 2) - 1 (y - (- 4)) + 5 (z - (- 1)) = 0 ⇔ 2 x - y + 5 z - 3 = 0 Vaja on leida punkti H 1 koordinaadid, mis on χ tasandi lõikepunkt tingimusega määratud sirgele. Peaksite liikuma kanoonilisest vaatest ristuvale vaatele. Seejärel saame võrrandisüsteemi kujul: x + 1 2 = y - 1 = z + 5 5 ⇔ - 1 · (x + 1) = 2 · y 5 · (x + 1) = 2 · (z + 5) 5 · y = - 1 · (z + 5) ⇔ x + 2 y + 1 = 0 5 x - 2 z - 5 = 0 5 y + z + 5 = 0 ⇔ x + 2 y + 1 = 0 5 x - 2 z - 5 = 0 On vaja arvutada süsteem x + 2 y + 1 = 0 5 x - 2 z - 5 = 0 2 x - y + 5 z - 3 = 0 ⇔ x + 2 y = - 1 5 x - 2 z = 5 2 x - y + 5 z = 3 Crameri meetodil, siis saame selle: ∆ = 1 2 0 5 0 - 2 2 - 1 5 = - 60 ∆ x = - 1 2 0 5 0 - 2 3 - 1 5 = - 60 ⇔ x = ∆ x ∆ = - 60 - 60 = 1 ∆ y = 1 - 1 0 5 5 2 2 3 5 = 60 ⇒ y = ∆ y ∆ = 60 - 60 = - 1 ∆ z = 1 2 - 1 5 0 5 2 - 1 3 = 0 ⇒ z = ∆ = 0 - ∆ 60 = 0 Siit saame selle H 1 (1, - 1, 0). M 1 H 1 = 1 - 2 2 + - 1 - - 4 2 + 0 - - 1 2 = 11 Teine meetod peab algama koordinaatide otsimisega kanoonilisest võrrandist. Selleks peate pöörama tähelepanu murdosa nimetajatele. Siis a → = 2, - 1, 5 on sirge x + 1 2 = y - 1 = z + 5 5 suunavektor. Pikkus on vaja arvutada valemiga a → = 2 2 + (- 1) 2 + 5 2 = 30. On selge, et sirge x + 1 2 = y - 1 = z + 5 5 lõikub punktiga M 3 (- 1 , 0 , - 5), seega on vektor, mille alguspunkt on M 3 (- 1 , 0 , - 5) ja selle ots punktis M 1 2, - 4, - 1 on M 3 M 1 → = 3, - 4, 4. Leidke vektorkorrutis a → = (2, - 1, 5) ja M 3 M 1 → = (3, - 4, 4). Saame avaldise kujul a → × M 3 M 1 → = i → j → k → 2 - 1 5 3 - 4 4 = - 4 i → + 15 j → - 8 k → + 20 i → - 8 · j → = 16 · i → + 7 · j → - 5 · k → leiame, et vektorkorrutise pikkus on võrdne a → × M 3 M 1 → = 16 2 + 7 2 + - 5 2 = 330. Meil on kõik andmed, et kasutada valemit sirgjoone punktist kauguse arvutamiseks, nii et rakendame seda ja saame: M 1 H 1 = a → × M 3 M 1 → a → = 330 30 = 11 Vastus: 11 . Kui märkate tekstis viga, tõstke see esile ja vajutage Ctrl+Enter Peterburi Riiklik Meretehnikaülikool Arvutigraafika ja teabetoe osakond 3. ÕPPETUND PRAKTILINE ÜLESANNE nr 3 Punkti ja sirge kauguse määramine.Punkti ja sirge vahelise kauguse saate määrata järgmiste konstruktsioonide abil (vt joonis 1): · punktist KOOS langetage risti sirgjoonele A; · märkige punkt TO risti ristumiskoht sirgega; mõõta lõigu pikkust KS, mille algus on etteantud punkt ja lõpp on märgitud lõikepunkt. Joonis 1. Kaugus punktist jooneni. Seda tüüpi probleemide lahendamise aluseks on täisnurga projektsioonireegel: täisnurk projitseeritakse ilma moonutusteta, kui selle vähemalt üks külg on projektsioonitasandiga paralleelne(st on erapositsioonil). Alustame just sellisest juhtumist ja vaatleme konstruktsioone punktist kauguse määramiseks KOOS sirge lõiguni AB. Selles ülesandes ei ole testnäiteid ja sees on toodud üksikute ülesannete täitmise võimalused tabel 1 ja tabel 2. Probleemi lahendust kirjeldatakse allpool ja vastavad konstruktsioonid on näidatud joonisel 2. 1. Kauguse määramine punktist konkreetse jooneni. Esiteks konstrueeritakse punkti ja lõigu projektsioonid. Projektsioon A1B1 teljega paralleelne X. See tähendab, et segment AB paralleelselt tasapinnaga P2. Kui punktist KOOS joonistada risti AB, siis projitseeritakse täisnurk moonutusteta tasapinnale P2. See võimaldab joonistada punktist risti C2 projektsioonile A2B2. Rippmenüü Joonise segment (Joonista- Liin) . Asetage kursor punkti C2 ja fikseerige see lõigu esimeseks punktiks. Liigutage kursor segmendi normaalse suunas A2B2 ja fikseerige sellel vihje ilmumise hetkel teine punkt Tavaline (Perpendikulaarne) . Märkige konstrueeritud punkt K2. Luba režiim ORTHO(ORTHO) , ja punktist K2 tõmmake vertikaalne ühendusjoon, kuni see lõikub projektsiooniga A1 B1. Määrake ristumispunkt K1. Punkt TO, lamades segmendil AB, on punktist tõmmatud risti lõikepunkt KOOS, segmendiga AB. Seega segment KS on nõutav kaugus punktist jooneni. Konstruktsioonidest on selgelt näha, et segment KS on üldisel positsioonil ja seetõttu on selle prognoosid moonutatud. Vahemaast rääkides peame alati silmas segmendi tegelik väärtus, mis väljendab kaugust. Seetõttu peame leidma segmendi tegeliku väärtuse KS, pöörates seda teatud asendisse, näiteks KS|| P1. Konstruktsioonide tulemus on näidatud joonisel 2. Joonisel 2 näidatud konstruktsioonide põhjal võime järeldada: joone konkreetne asukoht (lõik on paralleelne P1 või P2) võimaldab kiiresti koostada projektsioone punktist jooneni, kuid need on moonutatud.
Joonis 2. Kauguse määramine punktist konkreetse jooneni. 2. Punkti ja üldjoone kauguse määramine. Segment ei asu algseisundis alati kindlal positsioonil. Üldise algpositsiooni korral tehakse punktist jooneni kauguse määramiseks järgmised konstruktsioonid: a) teisendage joonise teisendusmeetodi abil segment üldisest positsioonist konkreetseks - see võimaldab konstrueerida kaugusprojektsioone (moonutatud); b) meetodi uuesti kasutades tõlkige nõutavale kaugusele vastav segment konkreetsesse kohta - saame kauguse projektsiooni suuruses, mis on võrdne tegelikuga. Mõelge punktist kauguse määramiseks konstruktsioonide järjestusele Aüldises positsioonis olevale segmendile Päike(joonis 3). Esimesel keerutamisel on vaja saada segmendi konkreetne asukoht INC. Selleks kihis TMR vaja punktid ühendada AT 2, C2 Ja A2. Kasutades käsku Muuda-pööra (Muutma – Pööra) kolmnurk В2С2А2 punkti ümber pöörata C2 asendisse, kus uus projektsioon B2*C2 paikneb rangelt horisontaalselt (punkt KOOS on liikumatu ja seetõttu kattub selle uus projektsioon algse ja tähistusega C2* Ja C1* ei pruugi olla joonisel näidatud). Selle tulemusena saadakse segmendi uued prognoosid B2*C2 ja punktid: A2*. Edasi punktidest A2* Ja AT 2* vertikaalsed viiakse läbi ja punktidest IN 1 Ja A1 horisontaalsed sideliinid. Vastavate joonte ristumiskoht määrab uue horisontaalprojektsiooni punktide asukoha: lõigu B1*C1 ja punktid A1*. Saadud konkreetses asendis saame selle jaoks koostada kauguse projektsioonid: punktist A1* tavaline selleks B1*C1. Nende vastastikuse ristumispunkt on K1*. Sellest punktist tõmmatakse vertikaalne ühendusjoon, kuni see lõikub projektsiooniga B2*C2. Märgitakse punkt K2*. Selle tulemusena saadi segmendi projektsioonid AK, mis on nõutav kaugus punktist A sirge lõiguni Päike. Järgmiseks on vaja konstrueerida kaugusprojektsioonid algseisundis. Et seda teha punktist K1* horisontaaljoont on mugav tõmmata, kuni see lõikub projektsiooniga В1С1 ja märkige ristumispunkt K1. Seejärel konstrueeritakse punkt K2 segmendi esiprojektsioonil ja projektsioonid viiakse läbi A1K1 Ja A2K2. Konstruktsioonide tulemusena saadi kauguse projektsioonid, kuid nii lõigu alg- kui ka uues osaasendis päike, joonelõik AK on üldisel positsioonil ja see toob kaasa asjaolu, et kõik selle prognoosid on moonutatud. Teisel pöördel segmenti on vaja pöörata AK konkreetsesse asendisse, mis võimaldab meil määrata kauguse tegeliku väärtuse - projektsioon A2*K2**. Kõigi konstruktsioonide tulemus on näidatud joonisel 3.
ÜLESANNE nr 3-1. KOOS segmendiga määratud konkreetse asukoha sirgjoonele AB. Esitage vastus millimeetrites (Tabel 1).Eemaldage projektsiooniläätsed Tabel 1 ÜLESANNE nr 3-2. Leidke tegelik kaugus punktist M sirgjoonele lõigu antud üldasendis ED. Esitage vastus millimeetrites (tabel 2). tabel 2 Ülesande nr 3 kontrollimine ja sooritamine. Antud punktist M sirge L kauguse arvutamiseks võite kasutada erinevatel viisidel. Näiteks kui võtame sirgel L suvalise punkti M 0, siis saame määrata vektori M 0 M ortogonaalprojektsioon sirge normaalvektori suunale. See projektsioon kuni märgini on nõutav kaugus. Teine viis punktist jooneni kauguse arvutamiseks põhineb kasutamisel sirge normaalvõrrand. Olgu sirge L antud normaalvõrrandiga (4.23). Kui punkt M(x; y) ei asu sirgel L, siis ortogonaalprojektsioon pr n OM raadiuse vektor punkt M sirge L ühiknormaalvektori n suunas on võrdne vektorite OM ja n skalaarkorrutisega, s.o. x cosφ + y sinφ. Sama projektsioon võrdub kauguse p alguspunktist sirgeni ja teatud väärtuse δ summaga (joonis 4.10). δ väärtus by absoluutväärtus võrdne kaugusega punktist M sirgjooneni. Sel juhul on δ > 0, kui punktid M ja O asuvad sirge vastaskülgedel ning δ on punkti M kõrvalekalle sirgest. Punkti M(x; y) kõrvalekalle δ sirgest L arvutatakse projektsiooni pr n OM ja alguspunktist sirge kauguse p vahena (vt. joon. 4.10), s.o. δ = x cosφ + y sinφ - p. Selle valemi abil saate ka kauguse p(M, L) punktist M(x; y) sirgjooneni L, mis saadakse normaalvõrrandiga: p(M, L) = |δ | = |x cosφ + y sinφ - p|. 2 Kaks kõrvuti asetsevat nurka annavad kokku 180° Arvestades ülaltoodud teisendusprotseduuri sirge üldvõrrand selle normaalvõrrandisse saame valemi kauguse kohta punktist M(x; y) sirgjooneni L, mis on antud selle üldvõrrandiga: Näide 4.8. Leiame tipust A tuleneva kolmnurga ABC kõrguse AH, mediaani AM ja poolitaja AD üldvõrrandid. Kolmnurga tippude koordinaadid on teada: A(-1;- 3), B(7; 3) ), C(1;7). Kõigepealt teeme näite tingimuse selgeks: näidatud võrrandite all peame silmas sirgete L AH, L AM ja L AD võrrandeid, millel asuvad määratud kolmnurga kõrgus AH, mediaan AM ja poolitaja AD. , vastavalt (joonis 4.11).  Sirge L AM võrrandi leidmiseks kasutame seda, et mediaan jagab kolmnurga vastaskülje pooleks. Olles leidnud külje BC keskkoha koordinaadid (x 1 ; y 1) x 1 = (7 + 1)/2 = 4, y 1 = (3 + 7)/2 = 5, kirjutame võrrandi L jaoks AM kujul kahte punkti läbiva sirge võrrandid,(x + 1)/(4 + 1) = (y + 3)/(5 + 3). Pärast teisendusi saame mediaani üldvõrrandi 8x - 5y - 7 = 0./p> Kõrguse L AH võrrandi leidmiseks kasutame seda, et kõrgus on risti kolmnurga vastasküljega. Seetõttu on vektor BC risti kõrgusega AH ja seda saab valida sirge L AH normaalvektoriks. Selle sirge võrrandi saame punktist A (4.15), asendades punkti A koordinaadid ja sirge L AH normaalvektori: (-6) (x + 1) + 4 (y + 3) = 0. Pärast teisendusi saame üldise kõrgusvõrrandi 3x - 2y - 3 = 0. Poolitaja L AD võrrandi leidmiseks kasutame asjaolu, et poolitaja AD kuulub nende punktide hulka N(x; y), mis on sirgest L AB ja L AC võrdsel kaugusel. Selle hulga võrrandil on vorm P(N, L AB) = P(N, L AC), (4,28) ja see määrab kaks sirget, mis läbivad punkti A ja jagavad sirgete L AB ja L AC vahelised nurgad pooleks. Kasutades kahte punkti läbiva sirge võrrandit, leiame sirgete L AB ja L AC üldvõrrandid: L AB: (x + 1)/(7 + 1) = (y + 3)/(3 + 3), L AC: (x + 1)/(1 + 1) = (y + 3)/(7) + 3) Pärast teisendusi saame L AB: 3x - 4y - 9 = 0, L AC: 5x - y + 2 = 0. Punkti ja sirge kauguse arvutamiseks valemi (4.27) abil kirjutame sisse võrrandi (4.28) vormi  Muudame selle mooduleid laiendades:  Selle tulemusena saame kahe sirge üldvõrrandid (3 ± 25/√26)x + (-4 ± 5/√26)y + (-9 ± 10/√26) = 0 Nende hulgast poolitaja võrrandi valimiseks võtame arvesse, et kolmnurga tipud B ja C asuvad soovitud sirge vastaskülgedel ja asendavad seetõttu nende koordinaadid vasak pool sirge L AD üldvõrrand peaks andma väärtused koos erinevad märgid. Valime ülemisele märgile vastava võrrandi, s.t. (3–25/√26)x + (-4 + 5/√26)y + (–9–10/√26) = 0 Punkti B koordinaatide asendamine selle võrrandi vasakpoolsesse külge annab negatiivse väärtuse, kuna (3 - 25/√26)7 + (-4 + 5/√26)3 + (-9 - 10/√26) = 21 - 12 - 9 + (-175 + 15 - 10)/√26 = -170/√26 ja sama märk saadakse punkti C koordinaatide jaoks, kuna (3 - 25/√26)1 + (-4 + 5/√26)7 + (-9 - 10/√26) = 3 - 28 - 9 + (-25 + 35 - 10)/√26 = -34 Järelikult asuvad tipud B ja C valitud võrrandiga samal pool sirget ja seetõttu on poolitaja võrrand (3 + 25/√26)x + (-4 - 5/√26)y + (-9 + 10/√26) = 0. Kaugus punktist sirgeni on punktist joonele tõmmatud risti pikkus. Kirjeldavas geomeetrias määratakse see graafiliselt, kasutades allpool toodud algoritmi. Algoritm
Järgmine joonis näitab keeruline joonistus punkt M ja sirge b, mis on määratletud segmendiga CD. Peate leidma nendevahelise kauguse. Meie algoritmi järgi tuleb esimese asjana joon viia projektsioonitasandiga paralleelsesse asendisse. Oluline on mõista, et pärast teisenduste läbiviimist ei tohiks punkti ja sirge tegelik kaugus muutuda. Seetõttu on siin mugav kasutada tasapinna asendusmeetodit, mis ei hõlma figuuride liigutamist ruumis. Ehituse esimese etapi tulemused on toodud allpool. Joonisel on näidatud, kuidas b-ga paralleelselt sisestatakse täiendav frontaaltasapind P 4. IN uus süsteem(P 1, P 4) punktid C"" 1, D"" 1, M"" 1 on X-teljest 1 samal kaugusel kui C", D", M"" X-teljest.
Algoritmi teist osa teostades langetame punktist M"" 1 risti M"" 1 N"" 1 sirgele b"" 1, kuna b ja MN vaheline täisnurk MND projitseeritakse tasapinnale P 4 täissuuruses. Sideliini abil määrame punkti N" asukoha ja teostame lõigu MN projektsiooni M"N".
Viimases etapis peate määrama segmendi MN suuruse selle projektsioonidest M"N" ja M"" 1 N"" 1. Selleks me ehitame täisnurkne kolmnurk M"" 1 N"" 1 N 0, mille jalg N"" 1 N 0 võrdub punktide M" ja N" kauguse vahega (Y M 1 – Y N 1) X 1 teljest. Kolmnurga M"" 1 N"" 1 N 0 hüpotenuusi pikkus M"" 1 N 0 vastab soovitud kaugusele M-st b-ni.
Teine lahendus
Sarnased ülesanded: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||









| Loe: |
|---|
Populaarne:
Aforismid ja tsitaadid enesetapu kohta
|
Uus
- Talvise poeetilise tsitaadi nägu lastele
- Vene keele tund "pehme märk pärast susisevaid nimisõnu"
- Helde puu (mõistusõna) Kuidas jõuda õnneliku lõpuni muinasjutule „Helde puu”
- Tunniplaan meid ümbritsevast maailmast teemal “Millal tuleb suvi?
- Ida-Aasia: riigid, rahvastik, keel, religioon, ajalugu Olles vastane pseudoteaduslikele teooriatele inimrasside jagamise kohta madalamateks ja kõrgemateks, tõestas ta tõde
- Ajateenistuseks sobivuse kategooriate klassifikatsioon
- Pahatahtlik kokkupuude ja armee Pahatihti armeesse ei võeta
- Miks unistate elusast surnud emast: unenägude raamatute tõlgendused
- Milliste sodiaagimärkide all on aprillis sündinud?
- Miks unistate tormist merelainetel?




