Razdelki spletnega mesta
Uredniški izbor:
- Šest primerov kompetentnega pristopa k sklanjanju števnikov
- Face of Winter Poetični citati za otroke
- Lekcija ruskega jezika "mehki znak za sikajočimi samostalniki"
- Velikodušno drevo (prispodoba) Kako priti do srečnega konca pravljice Radodarno drevo
- Načrt lekcije o svetu okoli nas na temo "Kdaj bo poletje?"
- Vzhodna Azija: države, prebivalstvo, jezik, vera, zgodovina Kot nasprotnik psevdoznanstvenih teorij o delitvi človeških ras na nižje in višje je dokazal resnico
- Razvrstitev kategorij primernosti za vojaško službo
- Malokluzija in vojska Malokluzija ni sprejeta v vojsko
- Zakaj sanjate mrtvo mamo živo: razlage sanjskih knjig
- V katerih znakih zodiaka so ljudje rojeni aprila?
Oglaševanje
| Analogni senzorji: uporaba, načini povezave s krmilnikom. Priključitev senzorjev s tokovnim izhodom na sekundarne naprave Sistem je sestavljen iz |
|
Diskretni senzorji Ta algoritem vam omogoča, da se izognete udarcem pri zapiranju kalupa, sicer se lahko preprosto razbije na majhne koščke. Enaka sprememba hitrosti se pojavi pri odpiranju kalupa. Tukaj dva kontaktna senzorja nista več dovolj. Uporaba analognih senzorjev Slika 2. Wheatstonov most Priključitev analognih senzorjev
Analogni senzorski izhodi
Toda en sam senzor praviloma ni dovolj. Nekatere izmed najbolj priljubljenih meritev so meritve temperature in tlaka. Število takih točk na sodobna proizvodnja lahko doseže nekaj deset tisoč. Temu primerno je veliko tudi število senzorjev. Zato je na en krmilnik najpogosteje priključenih več analognih senzorjev hkrati. Seveda ne več tisoč naenkrat, dobro je, če je ducat različnih. Takšna povezava je prikazana na sliki 7.
Slika 7. Priključitev več analognih senzorjev na krmilnik Ta slika prikazuje, kako se iz trenutnega signala pridobi napetost, primerna za pretvorbo v digitalno kodo. Če je takšnih signalov več, potem niso obdelani vsi naenkrat, ampak so časovno ločeni in multipleksirani, sicer bi bilo treba na vsak kanal namestiti ločen ADC. V ta namen ima krmilnik preklopno vezje. Funkcionalni diagram stikalo je prikazano na sliki 8.
Slika 8. Preklop kanalov analognega senzorja (sliko, ki jo je mogoče klikniti) Signali tokovne zanke, pretvorjeni v napetost na merilnem uporu (UR1...URn), se vodijo na vhod analognega stikala. Krmilni signali izmenično prehajajo na izhod enega od signalov UR1...URn, ki jih ojača ojačevalnik, in izmenično prihajajo na vhod ADC. Napetost, pretvorjena v digitalno kodo, se dovaja krmilniku. Shema je seveda zelo poenostavljena, vendar je v njej povsem mogoče upoštevati načelo multipleksiranja. Približno tako je zgrajen modul za vnos analognih signalov krmilnikov MSTS (mikroprocesorskega sistema). tehnična sredstva) proizvaja Smolensk PC "Prolog". Proizvodnja takšnih krmilnikov je že dolgo prekinjena, čeprav ponekod, daleč od najboljših, ti krmilniki še vedno služijo. Te muzejske eksponate nadomeščajo krmilniki novih modelov, večinoma uvoženih (kitajskih). Če je krmilnik nameščen v kovinsko omarico, je priporočljivo, da oklopne pletenice povežete z ozemljitveno točko omare. Dolžina povezovalne linije lahko doseže več kot dva kilometra, kar se izračuna po ustreznih formulah. Tukaj ne bomo ničesar šteli, a verjemite, res je. Novi senzorji, novi krmilniki S prihodom novih krmilnikov so se pojavili tudi novi analogni senzorji, ki delujejo po protokolu HART (Highway Addressable Remote Transducer), kar v prevodu pomeni »Merilni pretvornik, naslovljen na daljavo preko avtoceste«. Izhodni signal senzorja (terenske naprave) je analogni tokovni signal v območju 4...20 mA, na katerega je superponiran frekvenčno moduliran (FSK - Frequency Shift Keying) digitalni komunikacijski signal. Znano je, da je povprečna vrednost sinusnega signala enaka nič, zato prenos digitalnih informacij ne vpliva na izhodni tok senzorja 4...20 mA. Ta način se uporablja pri konfiguraciji senzorjev. Komunikacija HART se izvaja na dva načina. V prvem primeru, standardnem, lahko samo dve napravi izmenjujeta informacije po dvožilni liniji, medtem ko je izhodni analogni signal 4...20 mA odvisen od izmerjene vrednosti. Ta način se uporablja pri konfiguraciji terenskih naprav (senzorjev). V drugem primeru je na dvožilno linijo mogoče priključiti do 15 senzorjev, katerih število je določeno s parametri komunikacijske linije in močjo napajanja. To je večtočkovni način. V tem načinu ima vsak senzor svoj naslov v območju 1...15, po katerem krmilna naprava dostopa do njega. Senzor z naslovom 0 je izključen iz komunikacijske linije. Izmenjava podatkov med senzorjem in krmilno napravo v večtočkovnem načinu poteka samo s frekvenčnim signalom. Trenutni signal senzorja je fiksiran na zahtevani ravni in se ne spreminja. Pri večtočkovni komunikaciji podatki ne pomenijo le dejanskih rezultatov meritev spremljanega parametra, ampak tudi cel niz vseh vrst servisnih informacij. Najprej so to naslovi senzorjev, krmilni ukazi in konfiguracijski parametri. In vse te informacije se prenašajo po dvožilnih komunikacijskih linijah. Se je mogoče znebiti tudi njih? Res je, da je to treba storiti previdno, le v primerih, ko brezžična povezava ne more vplivati na varnost nadzorovanega procesa. Te tehnologije so nadomestile staro analogno tokovno zanko. Vendar se ne odreče svojemu položaju, široko se uporablja, kjer koli je to mogoče. V procesu avtomatizacije tehnološki procesi Za krmiljenje mehanizmov in enot se je treba ukvarjati z meritvami različnih fizikalnih količin. To je lahko temperatura, tlak in pretok tekočine ali plina, hitrost vrtenja, jakost svetlobe, informacije o položaju delov mehanizmov in še veliko več. Te informacije se pridobijo s pomočjo senzorjev. Tukaj najprej o položaju delov mehanizmov. Diskretni senzorji Najenostavnejši senzor je navaden mehanski kontakt: vrata se odprejo - kontakt se odpre, zapre - zapre. Tako preprost senzor, kot tudi dani algoritem delovanja, se pogosto uporablja v varnostni alarmi. Za mehanizem s translacijskim gibanjem, ki ima dva položaja, na primer vodni ventil, boste potrebovali dva kontakta: en kontakt je zaprt - ventil je zaprt, drugi je zaprt - je zaprt. Kompleksnejši algoritem translacijskega gibanja ima mehanizem za zapiranje termoplastičnega kalupa avtomatskega stroja. Na začetku je kalup odprt, to je začetni položaj. V tem položaju se odstranijo iz kalupa končnih izdelkov. Nato delavec zapre varovalo in kalup se začne zapirati ter začne se nov delovni cikel. Razdalja med polovicama kalupa je precej velika. Zato se kalup sprva premika hitro in na neki razdalji, preden se polovici zapreta, se sproži končno stikalo, hitrost gibanja se znatno zmanjša in kalup se gladko zapre. Tako so kontaktni senzorji diskretni ali binarni, imajo dva položaja, zaprto - odprto ali 1 in 0. Z drugimi besedami lahko rečemo, da se je dogodek zgodil ali ne. V zgornjem primeru je več točk "ujetih" s kontakti: začetek gibanja, točka zmanjševanja hitrosti, konec gibanja. V geometriji točka nima dimenzij, samo točka in to je to. Lahko je (na listu papirja, v tiru gibanja, kot v našem primeru) ali pa preprosto ne obstaja. Zato se za zaznavanje točk uporabljajo diskretni senzorji. Morda primerjava s točko tukaj ni preveč primerna, saj v praktične namene uporabljajo natančnost odziva diskretnega senzorja, ta natančnost pa je veliko večja od geometrijske točke. Toda sam mehanski stik je nezanesljiv. Zato se mehanski kontakti, kjer je le mogoče, nadomestijo z brezkontaktnimi senzorji. Najenostavnejša možnost so reed stikala: magnet se približa, kontakt se zapre. Natančnost reed stikala pušča veliko želenega; takšne senzorje je treba uporabljati le za določanje položaja vrat. Različne brezkontaktne senzorje je treba obravnavati kot bolj zapleteno in natančno možnost. Če je kovinska zastavica vstopila v režo, se je senzor sprožil. Primer takih senzorjev so senzorji BVK (Contactless Limit Switch) različnih serij. Odzivna natančnost (diferencial potovanja) takih senzorjev je 3 milimetre. Senzor serije BVK Slika 1. Senzor serije BVK Napajalna napetost senzorjev BVK je 24V, bremenski tok je 200mA, kar je povsem dovolj za priključitev vmesnih relejev za nadaljnjo koordinacijo s krmilnim vezjem. Tako se senzorji BVK uporabljajo v različni opremi. Poleg senzorjev BVK se uporabljajo tudi senzorji tipov BTP, KVP, PIP, KVD, PISH. Vsaka serija ima več vrst senzorjev, označenih s številkami, na primer BTP-101, BTP-102, BTP-103, BTP-211. Vsi omenjeni senzorji so brezkontaktni diskretni, njihov glavni namen je določanje položaja delov mehanizmov in sklopov. Seveda je teh senzorjev veliko več, o vseh jih je nemogoče napisati v enem članku. Še pogostejša in še vedno najdena široka uporaba različni kontaktni senzorji. Uporaba analognih senzorjev Poleg diskretnih senzorjev se v sistemih avtomatizacije široko uporabljajo analogni senzorji. Njihov namen je pridobivanje informacij o različnih fizikalnih količinah, in to ne le na splošno, temveč v realnem času. Natančneje preobrazba fizikalna količina(tlak, temperatura, osvetljenost, pretok, napetost, tok) v električni signal, primeren za prenos po komunikacijskih linijah do krmilnika in njegovo nadaljnjo obdelavo. Analogni senzorji so običajno nameščeni precej daleč od krmilnika, zato jih pogosto imenujemo terenske naprave. Ta izraz se pogosto uporablja v strokovni literaturi. Analogni senzor je običajno sestavljen iz več delov. Večina glavni del To je občutljiv element - senzor. Njegov namen je pretvorba izmerjene vrednosti v električni signal. Toda signal, prejet od senzorja, je običajno majhen. Za pridobitev signala, primernega za ojačanje, je senzor najpogosteje vključen v mostično vezje - Wheatstonov most. Wheatstonov most Slika 2. Wheatstonov most Prvotni namen mostnega vezja je natančno merjenje upora. Vir je povezan z diagonalo AD mosta enosmerni tok. Na drugo diagonalo je povezan občutljiv galvanometer s sredino, z ničlo na sredini skale. Če želite izmeriti upornost upora Rx, morate z vrtenjem nastavitvenega upora R2 doseči ravnovesje mostu in nastaviti iglo galvanometra na nič. Odstopanje puščice instrumenta v eno ali drugo smer vam omogoča, da določite smer vrtenja upora R2. Vrednost izmerjenega upora se določi s skalo v kombinaciji z ročajem upora R2. Ravnotežni pogoj za most je enakost razmerij R1/R2 in Rx/R3. V tem primeru med točkama BC dobimo ničelno potencialno razliko in skozi galvanometer V ne teče tok. Upornost uporov R1 in R3 je izbrana zelo natančno, njihov razpon mora biti minimalen. Samo v tem primeru celo majhno neravnovesje mostu povzroči precej opazno spremembo napetosti diagonale BC. Prav ta lastnost mostu se uporablja za povezavo občutljivih elementov (senzorjev) različnih analognih senzorjev. No, potem je vse preprosto, stvar tehnike. Za uporabo signala, prejetega s senzorja, je potrebna nadaljnja obdelava - ojačanje in pretvorba v izhodni signal, primeren za prenos in obdelavo s krmilnim vezjem - krmilnikom. Najpogosteje je izhodni signal analognih senzorjev tok (analogna tokovna zanka), manj pogosto napetost. Zakaj aktualni? Dejstvo je, da so izhodne stopnje analognih senzorjev zgrajene na podlagi tokovnih virov. To vam omogoča, da se znebite vpliva upora povezovalnih vodov na izhodni signal in uporabite dolge povezovalne vodnike. Nadaljnja pretvorba je precej preprosta. Tokovni signal se pretvori v napetost, za kar je dovolj, da tok spustimo skozi upor z znanim uporom. Padec napetosti na merilnem uporu dobimo po Ohmovem zakonu U=I*R. Na primer, za tok 10 mA na uporu z uporom 100 Ohm bo napetost 10 * 100 = 1000 mV, kar 1 volt! V tem primeru izhodni tok senzorja ni odvisen od upora povezovalnih žic. V razumnih mejah, seveda. Priključitev analognih senzorjev Napetost, dobljeno na merilnem uporu, lahko enostavno pretvorimo v digitalni pogled, primeren za vnos v krmilnik. Pretvorba se izvede z uporabo analogno-digitalnih pretvornikov (ADC). Digitalni podatki se v krmilnik prenašajo s serijsko ali vzporedno kodo. Vse je odvisno od specifičnega preklopnega vezja. Poenostavljen povezovalni diagram analogni senzor prikazano na sliki 3. Priključitev analognega senzorja Slika 3. Priključitev analognega senzorja (kliknite na sliko za povečavo) Na krmilnik so povezani aktuatorji ali pa je sam krmilnik povezan z računalnikom, ki je vključen v sistem avtomatizacije. Seveda imajo analogni senzorji celovito zasnovo, katere eden od elementov je ohišje s povezovalnimi elementi. Kot primer je na sliki 4 prikazan videz senzorja nadtlaka tipa Zond-10. Senzor nadtlaka Zond-10 Slika 4. Senzor nadtlaka Zond-10 Na spodnjem delu senzorja je viden priključni navoj za priklop na cevovod, desno pod črnim pokrovom pa je konektor za povezavo komunikacijske linije s krmilnikom. Tesnjenje navojna povezava je izdelan s pomočjo podložke iz žarjenega bakra (vključen v paketu dostave senzorja), in ne z navijanjem iz fum traku ali lanu. To se naredi tako, da se pri namestitvi senzorja senzorski element, ki se nahaja v notranjosti, ne deformira. Analogni senzorski izhodi V skladu s standardi obstajajo trije razponi tokovnih signalov: 0...5mA, 0...20mA in 4...20mA. Kakšna je njihova razlika in kakšne so njihove značilnosti? Najpogosteje je odvisnost izhodnega toka neposredno sorazmerna z izmerjeno vrednostjo, na primer, višji kot je tlak v cevi, večji je tok na izhodu senzorja. Čeprav se včasih uporablja obratno preklapljanje: večji izhodni tok ustreza najmanjša vrednost izmerjena vrednost na izhodu senzorja. Vse je odvisno od vrste uporabljenega krmilnika. Nekateri senzorji imajo celo preklop z neposrednega na inverzni signal. Izhodni signal v območju 0...5mA je zelo majhen in zato dovzeten za motnje. Če signal takega senzorja niha, medtem ko vrednost izmerjenega parametra ostane nespremenjena, potem obstaja priporočilo za namestitev kondenzatorja s kapaciteto 0,1 ... 1 μF vzporedno z izhodom senzorja. Tokovni signal v območju 0...20mA je bolj stabilen. Toda oba razpona sta slaba, ker nam ničla na začetku lestvice ne omogoča nedvoumne ugotovitve, kaj se je zgodilo. Ali je izmerjeni signal dejansko dosegel ničelno raven, kar je načeloma možno, ali pa se je komunikacijska linija preprosto pretrgala? Zato se, če je le mogoče, poskušajo izogniti uporabi teh razponov. Signal analognih senzorjev z izhodnim tokom v območju 4 ... 20 mA velja za bolj zanesljivega. Njegova odpornost proti hrupu je precej visoka, spodnja meja, tudi če ima izmerjeni signal ničelno raven, bo 4 mA, kar nam omogoča, da rečemo, da komunikacijska linija ni prekinjena. Druga dobra lastnost območja 4...20 mA je, da je mogoče senzorje povezati samo z dvema žicama, saj je to tok, ki napaja sam senzor. To je njegova trenutna poraba in hkrati merilni signal. Napajanje senzorjev v območju 4...20 mA je vključeno, kot je prikazano na sliki 5. Hkrati imajo senzorji Zond-10, tako kot mnogi drugi, glede na njihov podatkovni list široko območje napajalne napetosti 10 ...38V, čeprav se najpogosteje uporabljajo stabilizirani viri z napetostjo 24V. Priključitev analognega senzorja z zunanji vir prehrana Slika 5. Povezava analognega senzorja z zunanjim napajanjem Ta diagram vsebuje naslednje elemente in simbole. Rsh je merilni shunt upor, Rl1 in Rl2 sta upornost komunikacijskih vodov. Za večjo natančnost merjenja je treba kot Rsh uporabiti natančen merilni upor. Pretok toka iz vira energije je prikazan s puščicami. Preprosto je videti, da izhodni tok napajalnika poteka od +24V terminala, skozi linijo Rl1 doseže senzorski terminal +AO2, gre skozi senzor in skozi izhodni kontakt senzorja - AO2, povezovalni vod Rl2, upor Rsh se vrne na napajalni terminal -24V. To je to, tokokrog je sklenjen, tok teče. Če ima krmilnik napajalnik 24 V, je možna priključitev senzorja ali merilnega pretvornika po diagramu, prikazanem na sliki 6. Priključitev analognega senzorja na krmilnik z notranjim napajanjem Slika 6. Priključitev analognega senzorja na krmilnik z notranjim napajanjem Ta diagram prikazuje še en element - balastni upor Rb. Njegov namen je zaščita merilnega upora v primeru kratkega stika v komunikacijski liniji ali okvare analognega senzorja. Namestitev upora Rb je neobvezna, vendar zaželena. Poleg različnih senzorjev imajo merilni pretvorniki tudi tokovni izhod, ki se pogosto uporabljajo v sistemih avtomatizacije. Merilni pretvornik je naprava za pretvorbo nivojev napetosti, na primer 220 V ali toka nekaj deset ali sto amperov v tokovni signal 4 ... 20 mA. Tu se preprosto pretvori nivo električnega signala in ne predstavitev neke fizikalne količine (hitrost, pretok, tlak) v električni obliki. Toda en sam senzor praviloma ni dovolj. Nekatere izmed najbolj priljubljenih meritev so meritve temperature in tlaka. Število takih točk v sodobni proizvodnji lahko doseže več deset Preberite tudi
Od leta 1950 se tokovne zanke uporabljajo za prenos podatkov iz oddajnikov v aplikacijah za spremljanje in nadzor. Z nizkimi stroški implementacije, visoko odpornostjo proti hrupu in zmožnostjo prenosa signalov na velike razdalje se je tokovna zanka izkazala za posebej priročno za delovanje v industrijskih okoljih. To gradivo je namenjeno opisu osnovnih principov delovanja tokovne zanke, osnov oblikovanja in konfiguracije. Uporaba toka za prenos podatkov iz pretvornika Industrijski senzorji za prenos podatkov pogosto uporabljajo tokovni signal, za razliko od večine drugih pretvornikov, kot so termoelementi ali merilniki napetosti, ki uporabljajo napetostni signal. Kljub dejstvu, da se pretvorniki, ki uporabljajo napetost kot parameter za prenos informacij, dejansko učinkovito uporabljajo v mnogih proizvodne naloge, obstaja vrsta aplikacij, kjer je zaželena uporaba trenutnih karakteristik. Pomembna pomanjkljivost uporabe napetosti za prenos signalov v industrijskih okoljih je oslabitev signala pri prenosu na velike razdalje zaradi prisotnosti upora žične linije komunikacije. Seveda lahko uporabite naprave z visoko vhodno impedanco, da preprečite izgubo signala. Vendar bodo takšne naprave zelo občutljive na hrup, ki ga povzročajo bližnji motorji, pogonski jermeni ali oddajniki. Po prvem Kirchhoffovem zakonu je vsota tokov, ki tečejo v vozlišče, enaka vsoti tokov, ki tečejo iz vozlišča. Slika 1. V skladu s prvim Kirchhoffovim zakonom je tok na začetku tokokroga enak toku na njegovem koncu. To je osnovni princip, po katerem deluje merilna zanka. Merjenje toka kjer koli v tokovni zanki (merilni zanki) daje enak rezultat. Z uporabo trenutnih signalov in sprejemnikov za pridobivanje podatkov z nizko vhodno impedanco lahko industrijske aplikacije veliko pridobijo z izboljšano odpornostjo proti motnjam in povečano dolžino povezave. Komponente tokovne zanke Slika 2. Funkcionalni diagram tokovne zanke. Vir enosmernega toka zagotavlja napajanje sistema. Pretvornik uravnava tok v žicah od 4 do 20 mA, kjer 4 mA predstavlja živo ničlo in 20 mA predstavlja maksimalni signal. Za lažje razumevanje principa delovanja tokovne zanke razmislite na primer o zasnovi sistema s pretvornikom, ki ima naslednje tehnične lastnosti: Pretvornik se uporablja za merjenje tlaka Začnimo si ogledovati primer z izbiro ustreznega pretvornika. Trenutna zasnova sistema Izbira pretvornika Prvi korak pri oblikovanju trenutnega sistema je izbira pretvornika. Ne glede na vrsto merjene veličine (pretok, tlak, temperatura itd.) pomemben dejavnik pri izbiri pretvornika je njegova delovna napetost. Samo priključitev vira energije na pretvornik vam omogoča uravnavanje toka v komunikacijski liniji. Vrednost napetosti vira energije mora biti v sprejemljivih mejah: več kot minimalno zahtevano, manj kot največja vrednost ki lahko poškoduje pretvornik. Za tokovni sistem v primeru izbrani pretvornik meri tlak in ima delovno napetost od 12 do 30 V. Ko je pretvornik izbran, je treba tokovni signal pravilno izmeriti, da se zagotovi natančen prikaz tlaka, ki se uporablja za pretvornik. . Izbira naprave za zajemanje podatkov za merjenje toka Pomemben vidik, na katerega morate biti pozorni pri gradnji tokovnega sistema, je preprečiti pojav tokovne zanke v ozemljitvenem krogu. Običajna tehnika v takih primerih je izolacija. Z uporabo izolacije se lahko izognete vplivu ozemljitvene zanke, katere pojav je pojasnjen na sliki 3. Slika 3. Ozemljitvena zanka Ozemljitvene zanke nastanejo, ko sta dva priključka povezana v vezje različni kraji potenciali. Ta razlika vnaša dodaten tok v komunikacijsko linijo, kar lahko privede do napak pri merjenju. Ker tok ne more teči skozi izolacijsko pregrado, imata ozemljitveni točki ojačevalnika in vira signala enak potencial. To odpravlja možnost nenamernega ustvarjanja ozemljitvene zanke. Slika 4. Običajna napetost in signalna napetost v izoliranem krogu Izolacija tudi preprečuje poškodbe naprave za zajemanje podatkov, ko so prisotne visoke skupne napetosti. Skupna napetost je napetost iste polarnosti, ki je prisotna na obeh vhodih instrumentacijskega ojačevalnika. Na primer na sl. 4. Tako pozitivni (+) kot negativni (-) vhodi ojačevalnika imajo napetost +14 V običajnega načina. Številne naprave za zajemanje podatkov imajo največje vhodno območje ±10 V. Če naprava za pridobivanje podatkov nima izolacije in je skupna napetost izven največjega vhodnega območja, lahko poškodujete napravo. Čeprav je običajna (signalna) napetost na vhodu ojačevalnika na sliki 4 le +2 V, lahko dodajanje +14 V povzroči napetost +16 V V izolaciji je skupna točka ojačevalnika električno ločena od ničelne točke. V vezju na sliki 4 je potencial na skupni točki ojačevalnika "dvignjen" na raven +14 V. Ta tehnika povzroči, da vhodna napetost pade s 16 na 2 V. Zdaj, ko so podatki zbrani, naprava ni več v nevarnosti poškodb zaradi prenapetosti. (Upoštevajte, da imajo izolatorji največjo skupno napetost, ki jo lahko zavrnejo.) Ko je naprava za zajemanje podatkov izolirana in zaščitena, je zadnji korak pri izdelavi tokovne zanke izbira ustreznega napajanja. Izbira vira napajanja Preprosto je določiti, kateri napajalnik najbolj ustreza vašim potrebam. Pri delovanju v tokovni zanki mora napajalnik proizvesti napetost, ki je enaka ali večja od vsote padcev napetosti na vseh elementih sistema. Naprava za zajemanje podatkov v našem primeru uporablja natančen shunt za merjenje toka. I*R=U S šantom 249 Ω lahko odstranimo napetost v območju od 1 do 5 V tako, da vrednost napetosti na vhodu naprave za zajemanje podatkov povežemo z vrednostjo izhodnega signala tlačnega pretvornika. 12 V+ 5 V=17 V Na prvi pogled zadostuje napetost 17 V, vendar je treba upoštevati dodatno obremenitev napajalnika, ki jo ustvarijo žice z električnim uporom. Upornost enega jedra, dolgega 2000 čevljev, bo 2000 * 2,62 / 100 = 52,4 m. Če ste za napajanje zadevnega tokokroga uporabili 17 V, bo napetost, dovedena v tlačni pretvornik, pod minimalno delovno napetostjo zaradi padca upora žic in ranžirnega upora. Izbira tipičnega napajalnika 24 V bo zadostila zahtevam po moči pretvornika. Poleg tega obstaja napetostna rezerva za postavitev senzorja tlaka na večjo razdaljo. S pravilnim pretvornikom, napravo za zajemanje podatkov, dolžino kabla in izbranim napajalnikom je zasnova preproste tokovne zanke končana. Za zahtevnejše aplikacije lahko v sistem vključite dodatne merilne kanale. V procesu avtomatizacije tehnoloških procesov za krmiljenje mehanizmov in enot se je treba ukvarjati z meritvami različnih fizikalnih količin. To je lahko temperatura, tlak in pretok tekočine ali plina, hitrost vrtenja, jakost svetlobe, informacije o položaju delov mehanizmov in še veliko več. Te informacije se pridobijo s pomočjo senzorjev. Tukaj najprej o položaju delov mehanizmov. Diskretni senzorji Najenostavnejši senzor je navaden mehanski kontakt: vrata se odprejo - kontakt se odpre, zapre - zapre. Tako preprost senzor, kot tudi podani algoritem delovanja, pogosto... Za mehanizem s translacijskim gibanjem, ki ima dva položaja, na primer vodni ventil, boste potrebovali dva kontakta: en kontakt je zaprt - ventil je zaprt, drugi je zaprt - je zaprt. Kompleksnejši algoritem translacijskega gibanja ima mehanizem za zapiranje termoplastičnega kalupa avtomatskega stroja. Na začetku je kalup odprt, to je začetni položaj. V tem položaju se končni izdelki odstranijo iz kalupa. Nato delavec zapre varovalo in kalup se začne zapirati ter začne se nov delovni cikel. Razdalja med polovicama kalupa je precej velika. Zato se kalup sprva premika hitro in na neki razdalji, preden se polovici zapreta, se sproži končno stikalo, hitrost gibanja se znatno zmanjša in kalup se gladko zapre. Ta algoritem vam omogoča, da se izognete udarcem pri zapiranju kalupa, sicer se lahko preprosto razbije na majhne koščke. Enaka sprememba hitrosti se pojavi pri odpiranju kalupa. Tukaj dva kontaktna senzorja nista več dovolj. Tako so kontaktni senzorji diskretni ali binarni, imajo dva položaja, zaprto - odprto ali 1 in 0. Z drugimi besedami lahko rečemo, da se je dogodek zgodil ali ne. V zgornjem primeru je več točk "ujetih" s kontakti: začetek gibanja, točka zmanjševanja hitrosti, konec gibanja. V geometriji točka nima dimenzij, samo točka in to je to. Lahko je (na listu papirja, v tiru gibanja, kot v našem primeru) ali pa preprosto ne obstaja. Zato se za zaznavanje točk uporabljajo diskretni senzorji. Morda primerjava s točko tukaj ni preveč primerna, saj v praktične namene uporabljajo natančnost odziva diskretnega senzorja, ta natančnost pa je veliko večja od geometrijske točke. Toda sam mehanski stik je nezanesljiv. Zato se mehanski kontakti, kjer je le mogoče, nadomestijo z brezkontaktnimi senzorji. Najenostavnejša možnost so reed stikala: magnet se približa, kontakt se zapre. Natančnost reed stikala pušča veliko želenega; takšne senzorje je treba uporabljati le za določanje položaja vrat. Različne brezkontaktne senzorje je treba obravnavati kot bolj zapleteno in natančno možnost. Če je kovinska zastavica vstopila v režo, se je senzor sprožil. Primer takih senzorjev so senzorji BVK (Contactless Limit Switch) različnih serij. Odzivna natančnost (diferencial potovanja) takih senzorjev je 3 milimetre.
Slika 1. Senzor serije BVK Napajalna napetost senzorjev BVK je 24V, bremenski tok je 200mA, kar je povsem dovolj za priključitev vmesnih relejev za nadaljnjo koordinacijo s krmilnim vezjem. Tako se senzorji BVK uporabljajo v različni opremi. Poleg senzorjev BVK se uporabljajo tudi senzorji tipov BTP, KVP, PIP, KVD, PISH. Vsaka serija ima več vrst senzorjev, označenih s številkami, na primer BTP-101, BTP-102, BTP-103, BTP-211. Vsi omenjeni senzorji so brezkontaktni diskretni, njihov glavni namen je določanje položaja delov mehanizmov in sklopov. Seveda je teh senzorjev veliko več, o vseh jih je nemogoče napisati v enem članku. Različni kontaktni senzorji so še pogostejši in se še vedno pogosto uporabljajo. Uporaba analognih senzorjev Poleg diskretnih senzorjev se v sistemih avtomatizacije široko uporabljajo analogni senzorji. Njihov namen je pridobivanje informacij o različnih fizikalnih količinah, in to ne le na splošno, temveč v realnem času. Natančneje, pretvorba fizikalne veličine (tlak, temperatura, osvetljenost, pretok, napetost, tok) v električni signal, primeren za prenos po komunikacijskih linijah do krmilnika in njegovo nadaljnjo obdelavo. Analogni senzorji so običajno nameščeni precej daleč od krmilnika, zato jih pogosto imenujemo terenske naprave. Ta izraz se pogosto uporablja v strokovni literaturi. Analogni senzor je običajno sestavljen iz več delov. Najpomembnejši del je senzorski element - senzor. Njegov namen je pretvorba izmerjene vrednosti v električni signal. Toda signal, prejet od senzorja, je običajno majhen. Za pridobitev signala, primernega za ojačanje, je senzor najpogosteje vključen v mostno vezje - Wheatstonov most.
Slika 2. Wheatstonov most Prvotni namen mostnega vezja je natančno merjenje upora. Vir enosmernega toka je priključen na diagonalo AD mosta. Na drugo diagonalo je povezan občutljiv galvanometer s sredino, z ničlo na sredini skale. Če želite izmeriti upornost upora Rx, morate z vrtenjem nastavitvenega upora R2 doseči ravnovesje mostu in nastaviti iglo galvanometra na nič. Odstopanje puščice instrumenta v eno ali drugo smer vam omogoča, da določite smer vrtenja upora R2. Vrednost izmerjenega upora se določi s skalo v kombinaciji z ročajem upora R2. Ravnotežni pogoj za most je enakost razmerij R1/R2 in Rx/R3. V tem primeru med točkama BC dobimo ničelno potencialno razliko in skozi galvanometer V ne teče tok. Upornost uporov R1 in R3 je izbrana zelo natančno, njihov razpon mora biti minimalen. Samo v tem primeru celo majhno neravnovesje mostu povzroči precej opazno spremembo napetosti diagonale BC. Prav ta lastnost mostu se uporablja za povezavo občutljivih elementov (senzorjev) različnih analognih senzorjev. No, potem je vse preprosto, stvar tehnike. Za uporabo signala, prejetega s senzorja, je potrebna nadaljnja obdelava - ojačanje in pretvorba v izhodni signal, primeren za prenos in obdelavo s krmilnim vezjem - krmilnik. Najpogosteje je izhodni signal analognih senzorjev tok (analogna tokovna zanka), manj pogosto napetost. Zakaj aktualni? Dejstvo je, da so izhodne stopnje analognih senzorjev zgrajene na podlagi tokovnih virov. To vam omogoča, da se znebite vpliva upora povezovalnih vodov na izhodni signal in uporabite dolge povezovalne vodnike. Nadaljnja pretvorba je precej preprosta. Tokovni signal se pretvori v napetost, za kar je dovolj, da tok spustimo skozi upor z znanim uporom. Padec napetosti na merilnem uporu dobimo po Ohmovem zakonu U=I*R. Na primer, za tok 10 mA na uporu z uporom 100 Ohm bo napetost 10 * 100 = 1000 mV, kar 1 volt! V tem primeru izhodni tok senzorja ni odvisen od upora povezovalnih žic. V razumnih mejah, seveda. Priključitev analognih senzorjev Napetost, dobljeno na merilnem uporu, lahko enostavno pretvorimo v digitalno obliko, primerno za vnos v krmilnik. Pretvorba se izvede z uporabo analogno-digitalni pretvorniki ADC. Digitalni podatki se v krmilnik prenašajo s serijsko ali vzporedno kodo. Vse je odvisno od specifičnega preklopnega vezja. Poenostavljen diagram povezave za analogni senzor je prikazan na sliki 3. Slika 3. Priključitev analognega senzorja (kliknite na sliko za povečavo) Na krmilnik so povezani aktuatorji ali pa je sam krmilnik povezan z računalnikom, ki je vključen v sistem avtomatizacije. Seveda imajo analogni senzorji celovito zasnovo, katere eden od elementov je ohišje s povezovalnimi elementi. Kot primer je na sliki 4 prikazan videz senzorja nadtlaka tipa Zond-10.
Slika 4. Senzor nadtlaka Zond-10 Na spodnjem delu senzorja je viden priključni navoj za priklop na cevovod, desno pod črnim pokrovom pa je konektor za povezavo komunikacijske linije s krmilnikom. Navojna povezava je zatesnjena s podložko iz žarjenega bakra (vključena v dobavnem paketu senzorja) in ne z navijanjem s fum trakom ali lanom. To se naredi tako, da se pri namestitvi senzorja senzorski element, ki se nahaja v notranjosti, ne deformira. Analogni senzorski izhodi V skladu s standardi obstajajo trije razponi tokovnih signalov: 0...5mA, 0...20mA in 4...20mA. Kakšna je njihova razlika in kakšne so njihove značilnosti? Najpogosteje je odvisnost izhodnega toka neposredno sorazmerna z izmerjeno vrednostjo, na primer, višji kot je tlak v cevi, večji je tok na izhodu senzorja. Čeprav se včasih uporablja inverzno preklapljanje: večji izhodni tok ustreza najmanjši vrednosti izmerjene količine na izhodu senzorja. Vse je odvisno od vrste uporabljenega krmilnika. Nekateri senzorji imajo celo preklop z neposrednega na inverzni signal. Izhodni signal v območju 0...5mA je zelo majhen in zato dovzeten za motnje. Če signal takega senzorja niha, medtem ko vrednost izmerjenega parametra ostane nespremenjena, potem obstaja priporočilo za namestitev kondenzatorja s kapaciteto 0,1 ... 1 μF vzporedno z izhodom senzorja. Tokovni signal v območju 0...20mA je bolj stabilen. Toda oba razpona sta slaba, ker nam ničla na začetku lestvice ne omogoča nedvoumne ugotovitve, kaj se je zgodilo. Ali je izmerjeni signal dejansko dosegel ničelno raven, kar je načeloma možno, ali pa se je komunikacijska linija preprosto pretrgala? Zato se, če je le mogoče, poskušajo izogniti uporabi teh razponov. Signal analognih senzorjev z izhodnim tokom v območju 4 ... 20 mA velja za bolj zanesljivega. Njegova odpornost proti hrupu je precej visoka, spodnja meja, tudi če ima izmerjeni signal ničelno raven, bo 4 mA, kar nam omogoča, da rečemo, da komunikacijska linija ni prekinjena. Druga dobra lastnost območja 4...20 mA je, da je mogoče senzorje povezati samo z dvema žicama, saj je to tok, ki napaja sam senzor. To je njegova trenutna poraba in hkrati merilni signal. Napajanje senzorjev v območju 4...20 mA je vključeno, kot je prikazano na sliki 5. Hkrati imajo senzorji Zond-10, tako kot mnogi drugi, glede na njihov podatkovni list široko območje napajalne napetosti 10 ...38V, čeprav se najpogosteje uporabljajo z napetostjo 24V.
Slika 5. Povezava analognega senzorja z zunanjim napajanjem Ta diagram vsebuje naslednje elemente in simbole. Rsh je merilni shunt upor, Rl1 in Rl2 sta upornost komunikacijskih vodov. Za večjo natančnost merjenja je treba kot Rsh uporabiti natančen merilni upor. Pretok toka iz vira energije je prikazan s puščicami. Preprosto je videti, da izhodni tok napajalnika poteka od +24V terminala, skozi linijo Rl1 doseže senzorski terminal +AO2, gre skozi senzor in skozi izhodni kontakt senzorja - AO2, povezovalni vod Rl2, upor Rsh se vrne na napajalni terminal -24V. To je to, tokokrog je sklenjen, tok teče. Če ima krmilnik napajalnik 24 V, je možna priključitev senzorja ali merilnega pretvornika po diagramu, prikazanem na sliki 6.
Slika 6. Priključitev analognega senzorja na krmilnik z notranjim napajanjem Ta diagram prikazuje še en element - balastni upor Rb. Njegov namen je zaščita merilnega upora v primeru kratkega stika v komunikacijski liniji ali okvare analognega senzorja. Namestitev upora Rb je neobvezna, vendar zaželena. Poleg različnih senzorjev imajo merilni pretvorniki tudi tokovni izhod, ki se pogosto uporabljajo v sistemih avtomatizacije. Pretvornik- naprava za pretvorbo nivojev napetosti, na primer 220V ali tok več deset ali sto amperov v tokovni signal 4...20mA. Tu se preprosto pretvori nivo električnega signala in ne predstavitev neke fizikalne količine (hitrost, pretok, tlak) v električni obliki. Toda en sam senzor praviloma ni dovolj. Nekatere izmed najbolj priljubljenih meritev so meritve temperature in tlaka. Število takih točk v sodobnih tovarnah lahko doseže več deset tisoč. Temu primerno je veliko tudi število senzorjev. Zato je na en krmilnik najpogosteje priključenih več analognih senzorjev hkrati. Seveda ne več tisoč naenkrat, dobro je, če je ducat različnih. Takšna povezava je prikazana na sliki 7.
Slika 7. Priključitev več analognih senzorjev na krmilnik Ta slika prikazuje, kako se iz trenutnega signala pridobi napetost, primerna za pretvorbo v digitalno kodo. Če je takšnih signalov več, potem niso obdelani vsi naenkrat, ampak so časovno ločeni in multipleksirani, sicer bi bilo treba na vsak kanal namestiti ločen ADC. V ta namen ima krmilnik preklopno vezje. Funkcionalni diagram stikala je prikazan na sliki 8.
Slika 8. Preklop kanalov analognega senzorja (sliko, ki jo je mogoče klikniti) Signali tokovne zanke, pretvorjeni v napetost na merilnem uporu (UR1...URn), se vodijo na vhod analognega stikala. Krmilni signali izmenično prehajajo na izhod enega od signalov UR1...URn, ki jih ojača ojačevalnik, in izmenično prihajajo na vhod ADC. Napetost, pretvorjena v digitalno kodo, se dovaja krmilniku. Shema je seveda zelo poenostavljena, vendar je v njej povsem mogoče upoštevati načelo multipleksiranja. Približno tako je bil zgrajen modul za vnos analognih signalov krmilnikov MSTS (mikroprocesorski sistem tehničnih sredstev), ki ga je proizvedel smolenski PC "Prolog". Videz Krmilnik MCTS je prikazan na sliki 9.
Slika 9. Krmilnik MSTS Proizvodnja takšnih krmilnikov je že dolgo prekinjena, čeprav ponekod, daleč od najboljših, ti krmilniki še vedno služijo. Te muzejske eksponate nadomeščajo krmilniki novih modelov, večinoma uvoženih (kitajskih). Če je krmilnik nameščen v kovinsko omarico, je priporočljivo, da oklopne pletenice povežete z ozemljitveno točko omare. Dolžina povezovalnih vodov lahko doseže več kot dva kilometra, kar se izračuna po ustreznih formulah. Tukaj ne bomo ničesar šteli, a verjemite, res je. Novi senzorji, novi krmilniki S prihodom novih krmilnikov, novi analogni senzorji, ki uporabljajo protokol HART(Highway Addressable Remote Transducer), kar pomeni »merilni pretvornik, naslovljen na daljavo prek avtoceste«. Izhodni signal senzorja (terenske naprave) je analogni tokovni signal v območju 4...20 mA, na katerega je superponiran frekvenčno moduliran (FSK - Frequency Shift Keying) digitalni komunikacijski signal.
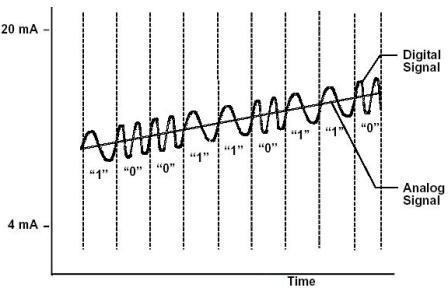
Slika 10. Izhod analognega senzorja prek protokola HART Na sliki je analogni signal, okoli njega pa se kot kača zvija sinusni val. To je frekvenčno moduliran signal. Toda to sploh ni digitalni signal; treba ga je še prepoznati. Na sliki je opazno, da je frekvenca sinusoide pri prenosu logične ničle višja (2,2 KHz) kot pri prenosu enote (1,2 KHz). Prenos teh signalov poteka s tokom z amplitudo ±0,5 mA sinusne oblike. Znano je, da je povprečna vrednost sinusnega signala enaka nič, zato prenos digitalnih informacij ne vpliva na izhodni tok senzorja 4...20 mA. Ta način se uporablja pri konfiguraciji senzorjev. Komunikacija HART se izvaja na dva načina. V prvem primeru, standardnem, lahko samo dve napravi izmenjujeta informacije po dvožilni liniji, medtem ko je izhodni analogni signal 4...20 mA odvisen od izmerjene vrednosti. Ta način se uporablja pri konfiguraciji terenskih naprav (senzorjev). V drugem primeru je na dvožilno linijo mogoče priključiti do 15 senzorjev, katerih število je določeno s parametri komunikacijske linije in močjo napajanja. To je večtočkovni način. V tem načinu ima vsak senzor svoj naslov v območju 1...15, po katerem krmilna naprava dostopa do njega. Senzor z naslovom 0 je izključen iz komunikacijske linije. Izmenjava podatkov med senzorjem in krmilno napravo v večtočkovnem načinu poteka samo s frekvenčnim signalom. Trenutni signal senzorja je fiksiran na zahtevani ravni in se ne spreminja. Pri večtočkovni komunikaciji podatki ne pomenijo le dejanskih rezultatov meritev spremljanega parametra, ampak tudi cel niz vseh vrst servisnih informacij. Najprej so to naslovi senzorjev, krmilni ukazi in konfiguracijski parametri. In vse te informacije se prenašajo po dvožilnih komunikacijskih linijah. Se je mogoče znebiti tudi njih? Res je, da je to treba storiti previdno, le v primerih, ko brezžična povezava ne more vplivati na varnost nadzorovanega procesa. Izkazalo se je, da se lahko znebite žic. Že leta 2007 je bil objavljen standard WirelessHART, nelicencirana frekvenca 2,4 GHz, na kateri delujejo številne brezžične računalniške naprave, vključno z brezžičnimi lokalnimi omrežji. Zato je mogoče brez omejitev uporabljati tudi naprave WirelessHART. Slika 11 prikazuje brezžično omrežje WirelessHART. Slika 11. Omrežje WirelessHART Te tehnologije so nadomestile staro analogno tokovno zanko. Vendar se ne odreče svojemu položaju, široko se uporablja, kjer koli je to mogoče. |













| Preberite: |
|---|
priljubljeno:
Aforizmi in citati o samomoru
|
Novo
- Face of Winter Poetični citati za otroke
- Lekcija ruskega jezika "mehki znak za sikajočimi samostalniki"
- Velikodušno drevo (prispodoba) Kako priti do srečnega konca pravljice Radodarno drevo
- Načrt lekcije o svetu okoli nas na temo "Kdaj bo poletje?"
- Vzhodna Azija: države, prebivalstvo, jezik, vera, zgodovina Kot nasprotnik psevdoznanstvenih teorij o delitvi človeških ras na nižje in višje je dokazal resnico
- Razvrstitev kategorij primernosti za vojaško službo
- Malokluzija in vojska Malokluzija ni sprejeta v vojsko
- Zakaj sanjate mrtvo mamo živo: razlage sanjskih knjig
- V katerih znakih zodiaka so ljudje rojeni aprila?
- Zakaj sanjate o nevihti na morskih valovih?




