Կայքի բաժիններ
Խմբագրի ընտրությունը.
- Թվերի անկման իրավասու մոտեցման վեց օրինակ
- Ձմեռային բանաստեղծական մեջբերումներ երեխաների համար
- Ռուսաց լեզվի դաս «փափուկ նշան գոյականների ֆշշոցից հետո»
- Առատաձեռն ծառը (առակ) Ինչպես երջանիկ ավարտ ունենալ հեքիաթի առատաձեռն ծառը
- Դասի պլան մեզ շրջապատող աշխարհի վերաբերյալ «Ե՞րբ է գալու ամառը» թեմայով:
- Արևելյան Ասիա. երկրներ, բնակչություն, լեզու, կրոն, պատմություն Լինելով մարդկային ռասաները ցածր և բարձրերի բաժանելու կեղծ գիտական տեսությունների հակառակորդը, նա ապացուցեց ճշմարտությունը.
- Զինվորական ծառայության համար պիտանիության կատեգորիաների դասակարգում
- Մալոկլյուզիան և բանակը Մալոկլյուզիան չի ընդունվում բանակում
- Ինչու եք երազում կենդանի մեռած մոր մասին. երազանքի գրքերի մեկնաբանություններ
- Կենդանակերպի ո՞ր նշանների ներքո են ծնվել ապրիլին.
Գովազդ
| Շարժիչի հարթ մեկնարկի դիագրամ. Էլեկտրական շարժիչի սահուն մեկնարկ: DIY ստեղծում |
|
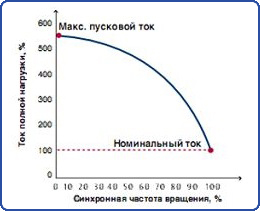
Էլեկտրական շարժիչի սահուն մեկնարկը ներս վերջերսօգտագործվում է ավելի ու ավելի հաճախ: Դրա կիրառման ոլորտները բազմազան են և բազմաթիվ: Դրանք են՝ արդյունաբերությունը, էլեկտրատրանսպորտը, կոմունալ ծառայությունները և գյուղատնտեսությունը։ Նման սարքերի օգտագործումը կարող է զգալիորեն նվազեցնել մեկնարկային բեռները էլեկտրական շարժիչի և շարժիչների վրա, դրանով իսկ երկարացնելով դրանց ծառայության ժամկետը: Մեկնարկային հոսանքներ Մեկնարկային հոսանքները հասնում են 7...10 անգամ ավելի մեծ արժեքների, քան գործառնական ռեժիմում: Սա հանգեցնում է մատակարարման ցանցում լարման «նվազման», ինչը բացասաբար է անդրադառնում ոչ միայն այլ սպառողների, այլև հենց շարժիչի վրա: Գործարկման ժամանակը հետաձգվում է, ինչը կարող է հանգեցնել ոլորունների գերտաքացման և դրանց մեկուսացման աստիճանական ոչնչացման: Սա նպաստում է էլեկտրական շարժիչի վաղաժամ ձախողմանը: Սարքեր փափուկ մեկնարկհնարավորություն է տալիս զգալիորեն նվազեցնել մեկնարկային բեռները էլեկտրական շարժիչի և էլեկտրացանցերի վրա, ինչը հատկապես կարևոր է գյուղական վայրերում կամ երբ շարժիչը սնվում է ինքնավար էլեկտրակայանից: Գործարկիչների գերբեռնվածություն Երբ շարժիչը միանում է, նրա լիսեռի ոլորող մոմենտը շատ անկայուն է և գերազանցում է անվանական արժեքը ավելի քան հինգ անգամ: Հետևաբար, ակտիվացուցիչների մեկնարկային բեռները նույնպես ավելանում են՝ համեմատած կայուն վիճակում և կարող են հասնել մինչև 500 տոկոսի: Մեկնարկային ոլորող մոմենտների անկայունությունը հանգեցնում է հարվածային բեռների հանդերձանքի ատամների վրա, բանալիների կտրում և երբեմն նույնիսկ լիսեռների ոլորում: Էլեկտրական շարժիչի փափուկ մեկնարկի սարքերը զգալիորեն նվազեցնում են մեկնարկային բեռները մեխանիզմի վրա. փոխանցման ատամների միջև բացերը սահուն ընտրված են, ինչը կանխում է դրանց կոտրումը: Գոտի շարժիչները նաև սահուն լարում են շարժիչ գոտիները, ինչը նվազեցնում է մեխանիզմների մաշվածությունը: Սահուն մեկնարկից բացի, սահուն արգելակման ռեժիմը բարենպաստ ազդեցություն ունի մեխանիզմների աշխատանքի վրա: Եթե շարժիչը մղում է պոմպը, ապա սահուն արգելակումը խուսափում է ջրային մուրճից, երբ միավորն անջատված է: Արդյունաբերական փափուկ մեկնարկիչներ Ներկայումս արտադրվում են բազմաթիվ ընկերությունների կողմից, օրինակ՝ Siemens, Danfoss, Schneider Electric: Նման սարքերն ունեն բազմաթիվ գործառույթներ, որոնք ծրագրավորվում են օգտագործողի կողմից: Սրանք են արագացման ժամանակը, դանդաղեցման ժամանակը, գերբեռնվածության պաշտպանությունը և շատ այլ լրացուցիչ գործառույթներ: Բոլոր առավելություններով հանդերձ, ֆիրմային սարքերն ունեն մեկ թերություն՝ բավականին բարձր գնով. Այնուամենայնիվ, դուք կարող եք ինքներդ ստեղծել նման սարք: Միեւնույն ժամանակ, դրա արժեքը փոքր կլինի: Փափուկ մեկնարկի սարք՝ հիմնված KR1182PM1 միկրոսխեմայի վրա Պատմությունը վերաբերում էր մասնագիտացված չիպ KR1182PM1, որը ներկայացնում է փուլային հզորության կարգավորիչը: Դիտարկվել են այն միացնելու բնորոշ սխեմաները, շիկացած լամպերի փափուկ մեկնարկային սարքերը և պարզապես բեռնվածքի հզորության կարգավորիչները: Այս միկրոսխեմայի հիման վրա հնարավոր է ստեղծել բավականին պարզ սարքեռաֆազ էլեկտրական շարժիչի սահուն մեկնարկ: Սարքի դիագրամը ներկայացված է Նկար 1-ում: Նկար 1. Շարժիչի փափուկ մեկնարկի սարքի սխեման: Փափուկ մեկնարկն իրականացվում է շարժիչի ոլորունների վրա լարման աստիճանական մեծացմամբ զրոյական արժեքդեպի անվանական։ Սա ձեռք է բերվում թրիստորի անջատիչների բացման անկյունը մեծացնելով մի ժամանակի ընթացքում, որը կոչվում է գործարկման ժամանակ: Սխեմայի նկարագրությունը Դիզայնում օգտագործվում է եռաֆազ էլեկտրական շարժիչ 50 Հց, 380 Վ: Աստղով միացված շարժիչի ոլորունները միացված են դիագրամում նշված ելքային սխեմաներին որպես L1, L2, L3: Աստղի կենտրոնական կետը միացված է ցանցի չեզոքին (N): Ելքային անջատիչները կատարվում են թրիստորների վրա, որոնք միացված են իրար հետ՝ զուգահեռաբար: Դիզայնում օգտագործվում են ներմուծված 40TPS12 տեսակի թրիստորներ: Էժան գնով նրանք ունեն բավականին մեծ հոսանք՝ մինչև 35 Ա, իսկ հակադարձ լարումը 1200 Վ է։ Բացի դրանցից, ստեղները պարունակում են ևս մի քանի տարրեր։ Դրանց նպատակը հետևյալն է՝ թրիստորներին զուգահեռ միացված RC սխեմաների խամրումը կանխում է վերջիններիս կեղծ միացումը (գծապատկերում դրանք R8C11, R9C12, R10C13 են), և RU1...RU3 վարիստորների օգնությամբ կլանում է անջատման աղմուկը։ , որի ամպլիտուդը գերազանցում է 500 Վ-ը։ DA1...DA3 KR1182PM1 տիպի միկրոսխեմաները օգտագործվում են որպես ելքային անջատիչների կառավարման հանգույցներ: Այս միկրոսխեմաները որոշ մանրամասնորեն քննարկվեցին: C5...C10 կոնդենսատորները միկրոսխեմայի ներսում ձևավորում են սղոցաձև լարում, որը համաժամացվում է ցանցի լարման հետ։ Միկրոշրջանում տիրիստորի կառավարման ազդանշանները ստեղծվում են սղոցի լարումը համեմատելով միկրոսխեմայի 3-րդ և 6-րդ պտուտակների միջև եղած լարման հետ: K1...K3 ռելեները միացնելու համար սարքն ունի սնուցման աղբյուր, որը բաղկացած է ընդամենը մի քանի տարրերից։ Սա տրանսֆորմատոր T1, ուղղիչ կամուրջ VD1, հարթեցնող կոնդենսատոր C4: Ուղղիչի ելքում տեղադրված է 7812 տիպի ինտեգրված կայունացուցիչ DA4, որն ապահովում է ելքային լարում 12 Վ և պաշտպանություն ելքի կարճ միացումներից և ծանրաբեռնվածությունից: Էլեկտրական շարժիչների համար փափուկ մեկնարկիչի շահագործման նկարագրությունը Ցանցի լարումը մատակարարվում է միացումին, երբ հոսանքի անջատիչը Q1 փակ է: Սակայն շարժիչը դեռ չի միանում։ Դա տեղի է ունենում այն պատճառով, որ K1...K3 ռելեի ոլորունները դեռևս անջատված են էներգիայից, և նրանց սովորաբար փակ կոնտակտները շրջանցում են DA1...DA3 միկրոսխեմաների 3-րդ և 6-րդ կապերը R1...R3 դիմադրիչների միջոցով: Այս հանգամանքը խանգարում է C1...C3 կոնդենսատորների լիցքավորմանը, ուստի միկրոսխեման չի առաջացնում կառավարման իմպուլսներ: Սարքը շահագործման հանձնելը Երբ անջատիչ անջատիչը SA1 փակ է, 12 Վ լարումը միացնում է ռելե K1…K3: Նրանց սովորաբար փակ կոնտակտները բացվում են, ինչը հնարավորություն է տալիս լիցքավորել C1...C3 կոնդենսատորները ներքին հոսանքի գեներատորներից։ Այս կոնդենսատորների վրա լարման ավելացմանը զուգընթաց մեծանում է նաև թրիստորների բացման անկյունը։ Սա ապահովում է շարժիչի ոլորունների վրա լարման սահուն աճ: Երբ կոնդենսատորները լիովին լիցքավորված են, թրիստորների միացման անկյունը կհասնի իր առավելագույն արժեքին, իսկ էլեկտրական շարժիչի ռոտացիայի արագությունը կհասնի անվանական արագությանը: Շարժիչի անջատում, սահուն արգելակում Շարժիչը անջատելու համար բացեք SA1 անջատիչը Սա կանջատի ռելե K1...K3: Նորմալ են՝ փակ կոնտակտները կփակվեն, ինչը կհանգեցնի C1...C3 կոնդենսատորների լիցքաթափմանը R1...R3 ռեզիստորների միջոցով։ Կոնդենսատորների լիցքաթափումը կտևի մի քանի վայրկյան, որի ընթացքում շարժիչը կկանգնի: Շարժիչը միացնելիս զգալի հոսանքներ կարող են հոսել չեզոք մետաղալարով: Դա տեղի է ունենում, քանի որ սահուն արագացման ժամանակ շարժիչի ոլորունների հոսանքները ոչ սինուսոիդային են, բայց դրանից առանձնապես վախենալու կարիք չկա. մեկնարկային գործընթացը բավականին կարճատև է: Կայուն վիճակի ռեժիմում այս հոսանքը շատ ավելի քիչ կլինի (անվանական ռեժիմում ֆազային հոսանքի ոչ ավելի, քան տասը տոկոսը), ինչը պայմանավորված է միայն ոլորուն պարամետրերի տեխնոլոգիական ցրվածությամբ և փուլերի «սխալ դասավորությամբ»: Այս երեւույթներից այլեւս հնարավոր չէ ձերբազատվել։ Մանրամասներ և դիզայն Սարքը հավաքելու համար անհրաժեշտ են հետևյալ մասերը. 15 Վտ-ից ոչ ավելի հզորությամբ տրանսֆորմատոր՝ 15...17 Վ ելքային ոլորուն լարմամբ։ K1…K3 ռելեները հարմար են ցանկացած 12 Վ կծիկի լարման համար, որն ունի սովորաբար փակ կամ անջատիչ կոնտակտ, օրինակ՝ TRU-12VDC-SB-SL: Կոնդենսատորներ C11…C13 տեսակի K73-17 առնվազն 600 Վ աշխատանքային լարման համար: Սարքը պատրաստված է տպագիր տպատախտակ. Հավաքված սարքը պետք է տեղադրվի համապատասխան չափերի պլաստիկ պատյանում, որի ճակատային վահանակի վրա պետք է տեղադրվեն անջատիչ SA1 և LED-ները HL1 և HL2: Շարժիչի միացում Q1 անջատիչի և շարժիչի միջև կապը կատարվում է լարերով, որոնց խաչմերուկը համապատասխանում է վերջինիս հզորությանը։ Չեզոք մետաղալարը պատրաստված է նույն մետաղալարից, ինչ փուլային լարերը: Դիագրամում նշված բաղադրիչների գնահատականներով հնարավոր է միացնել մինչև չորս կիլովատ հզորությամբ շարժիչներ: Եթե նախատեսում եք օգտագործել մեկուկես կիլովատից ոչ ավելի հզորությամբ շարժիչ, և գործարկման հաճախականությունը չի գերազանցի ժամում 10...15-ը, ապա թրիստորային անջատիչների կողմից ցրված հզորությունը աննշան է, ուստի ռադիատորները. չի կարող տեղադրվել: Եթե դուք մտադիր եք օգտագործել ավելի հզոր շարժիչ, կամ գործարկումներն ավելի հաճախակի կլինեն, ապա ձեզ հարկավոր է թրիստորներ տեղադրել ալյումինե ժապավենից պատրաստված ռադիատորների վրա: Եթե ռադիատորը պետք է օգտագործվի որպես սովորական, ապա թրիստորները պետք է մեկուսացված լինեն դրանից՝ օգտագործելով միկա spacers: Սառեցման պայմանները բարելավելու համար կարող եք օգտագործել ջերմահաղորդիչ մածուկ KPT-8: Սարքի ստուգում և կարգավորում Նախքան միացնելը, առաջին հերթին ստուգեք տեղադրման համապատասխանությունը սխեմատիկ դիագրամ. Սա հիմնական կանոնն է, և դուք չեք կարող շեղվել դրանից: Ի վերջո, այս ստուգումը անտեսելը կարող է հանգեցնել մի շարք ածխացած մասերի և երկար ժամանակ ձեզ հետ պահել «էլեկտրաէներգիայի փորձարկումներ» անելուց: Հայտնաբերված սխալները պետք է վերացվեն, քանի որ, ի վերջո, այս շղթան սնուցվում է ցանցից, և այն չպետք է մանրացնել: Եվ նույնիսկ այս ստուգումից հետո շարժիչը միացնելու համար դեռ վաղ է։ Նախ շարժիչի փոխարեն պետք է միացնել երեք նույնական շիկացած լամպեր՝ 60...100 Վտ հզորությամբ։ Փորձարկման ժամանակ անհրաժեշտ է ապահովել, որ լամպերը «բոցավառվեն» հավասարաչափ։ Միացման անհավասար ժամանակը պայմանավորված է C1...C3 կոնդենսատորների հզորությունների ցրվածությամբ, որոնք ունեն հզորության զգալի հանդուրժողականություն: Հետևաբար, ավելի լավ է դրանք անմիջապես ընտրել սարքի միջոցով, նախքան տեղադրումը, առնվազն մինչև տասը տոկոս ճշգրտությամբ: Անջատման ժամանակը որոշվում է նաև R1…R3 ռեզիստորների դիմադրությամբ: Նրանց օգնությամբ դուք կարող եք հարմարեցնել անջատման ժամանակը: Այս կարգավորումները պետք է կատարվեն, եթե առկա է միացման-անջատման ժամանակի փոփոխություն տարբեր փուլերգերազանցում է 30 տոկոսը։ Շարժիչը կարելի է միացնել միայն վերը նշված ստուգումները նորմալ անցնելուց հետո, չասեմ նույնիսկ կատարյալ։ Էլ ի՞նչ կարելի է ավելացնել դիզայնին: Վերևում արդեն ասվեց, որ նման սարքերը ներկայումս արտադրվում են տարբեր ընկերությունների կողմից: Իհարկե, անհնար է կրկնօրինակել ֆիրմային սարքերի բոլոր գործառույթները նման տնական սարքում, բայց դուք դեռ կարող եք պատճենել մեկը: Խոսքը այսպես կոչվածի մասին է. Դրա նպատակը հետևյալն է. այն բանից հետո, երբ շարժիչը հասել է իր անվանական արագությանը, կոնտակտորը պարզապես կամրջում է թրիստորային անջատիչները իր կոնտակտներով: Նրանց միջով հոսում է հոսանքը՝ շրջանցելով թրիստորները։ Այս դիզայնը հաճախ կոչվում է շրջանցիկ (անգլերեն շրջանցում - շրջանցում): Նման բարելավման համար լրացուցիչ տարրեր պետք է ներմուծվեն կառավարման միավոր: Բորիս Ալադիշկին Էլեկտրական շարժիչներն աշխարհում ամենատարածված էլեկտրական մեքենաներն են: Ոչ մեկը արդյունաբերական ձեռնարկություն, ոչ մեկը գործընթացառանց նրանց չի կարող: Երկրպագուների, պոմպերի պտույտ, փոխակրիչ գոտիների շարժում, ամբարձիչների տեղաշարժ - սա շարժիչների օգնությամբ լուծված խնդիրների թերի, բայց արդեն նշանակալի ցուցակ է: Այնուամենայնիվ, առանց բացառության բոլոր էլեկտրական շարժիչների շահագործման մեջ կա մեկ նրբերանգ. գործարկման պահին նրանք համառոտ սպառում են մեծ հոսանք, որը կոչվում է մեկնարկային հոսանք: Երբ լարումը կիրառվում է ստատորի ոլորուն վրա, ռոտորի ռոտացիայի արագությունը զրո է: Ռոտորը պետք է տեղափոխվի և պտտվի մինչև գնահատված արագությունը: Սա զգալիորեն ավելի շատ էներգիա է պահանջում, քան անհրաժեշտ է անվանական աշխատանքային ռեժիմի համար:
Այն պահին, երբ մեկնարկային հոսանքը հոսում է ցանցից, զգալի հզորություն է սպառվում էլեկտրական շարժիչը իր անվանական աշխատանքային ռեժիմին հասցնելու համար: Որքան հզոր է էլեկտրական շարժիչը, այնքան ավելի շատ ուժ է անհրաժեշտ արագացման համար: Ոչ բոլոր էլեկտրական ցանցերն են հանդուրժում այս ռեժիմն առանց հետևանքների: Մատակարարման գծերի գերբեռնումը անխուսափելիորեն հանգեցնում է ցանցի լարման նվազմանը: Սա ոչ միայն ավելի է դժվարացնում էլեկտրական շարժիչների գործարկումը, այլև ազդում է մյուս սպառողների վրա: Իսկ էլեկտրաշարժիչներն իրենք են մեխանիկական և էլեկտրական բեռների ավելացում զգում գործարկման գործընթացում: Մեխանիկականները կապված են լիսեռի պտտման մեծացման հետ: Էլեկտրականները, որոնք կապված են հոսանքի կարճաժամկետ աճի հետ, ազդում են ստատորի և ռոտորի ոլորունների, կոնտակտային միացումների և մեկնարկային սարքավորումների մեկուսացման վրա: Ներխուժման հոսանքների նվազեցման մեթոդներԷժան բալաստներով ցածր հզորության էլեկտրական շարժիչները բավականին լավ են գործարկվում առանց որևէ միջոցի: Նրանց մեկնարկային հոսանքների կրճատումը կամ պտտման արագության փոփոխությունը տնտեսապես հնարավոր չէ: Բայց երբ գործարկման գործընթացում ցանցի գործառնական ռեժիմի վրա ազդեցությունը զգալի է, ներխուժման հոսանքները պահանջում են կրճատում: Սա ձեռք է բերվում հետևյալի միջոցով.
Այս մեթոդներից մեկը կամ մի քանիսը հարմար են յուրաքանչյուր մեխանիզմի համար: Էլեկտրական շարժիչներ՝ խոցված ռոտորով
Մեկնարկային հոսանքի կրճատումը ձեռք է բերվում ռոտորային միացումից դիմադրիչների աստիճանական հեռացման միջոցով: Սկզբում, լարման կիրառման պահին, առավելագույն հնարավոր դիմադրությունը միացված է ռոտորին: Երբ ժամանակի ռելեն արագանում է, նրանք մեկը մյուսի հետևից միացնում են կոնտակտորները, որոնք շրջանցում են առանձին դիմադրողական հատվածները: Արագացման վերջում ռոտորի միացման հետ կապված լրացուցիչ դիմադրությունը զրո է: Վերամբարձ շարժիչները չունեն ռեզիստորներով ավտոմատ փուլային միացում: Դա տեղի է ունենում կռունկավարի կամքով, որը տեղափոխում է կառավարման լծակները: Ստատորի ոլորուն միացման դիագրամի միացում
Դրա շնորհիվ ձեռք է բերվում որոշակի բազմակողմանիություն ասինխրոն էլեկտրական շարժիչների օգտագործման մեջ: Աստղային միացման սխեման նախատեսված է ավելի բարձր լարման մակարդակի համար (օրինակ՝ 660 Վ), եռանկյունի միացումը նախատեսված է ավելի ցածր լարման մակարդակի համար (մ. այս օրինակում- 380 Վ): Բայց եռանկյուն շղթային համապատասխանող անվանական մատակարարման լարման դեպքում դուք կարող եք օգտագործել աստղային միացում էլեկտրական շարժիչը նախապես արագացնելու համար: Այս դեպքում ոլորունն աշխատում է մատակարարման նվազեցված լարման դեպքում (660-ի փոխարեն 380 Վ), իսկ ներխուժման հոսանքը նվազում է: Միացման գործընթացը վերահսկելու համար ձեզ հարկավոր է լրացուցիչ մալուխ էլեկտրական շարժիչում, քանի որ օգտագործվում են բոլոր 6 ոլորուն տերմինալները: Նրանց աշխատանքը վերահսկելու համար տեղադրվում են լրացուցիչ մեկնարկիչներ և ժամանակային ռելեներ: Հաճախականության փոխարկիչներԱռաջին երկու մեթոդները չեն կարող կիրառվել ամենուր: Բայց հաջորդները, որոնք հասանելի են դարձել համեմատաբար վերջերս, թույլ են տալիս սահուն գործարկել ցանկացած ասինխրոն էլեկտրական շարժիչ: Հաճախականության փոխարկիչը բարդ կիսահաղորդչային սարք է, որը միավորում է ուժային էլեկտրոնիկան և միկրոպրոցեսորային տեխնոլոգիայի տարրերը: Հոսանքի հատվածը ուղղում և հարթեցնում է ցանցի լարումը, այն վերածելով մշտական լարման։ Այս լարման ելքային մասը կազմում է սինուսոիդային մեկը՝ զրոյից մինչև անվանական արժեքի փոփոխական հաճախականությամբ՝ 50 Հց: Դրա շնորհիվ ձեռք է բերվում էներգիայի խնայողություն. ռոտացիայի մեջ դրված ագրեգատները չեն գործում չափազանց արտադրողականությամբ՝ գտնվելով խիստ պահանջվող ռեժիմում: Բացի այդ, տեխնոլոգիական գործընթացն ունի նուրբ կարգավորելու հնարավորություն։
Բայց այն, ինչ կարևոր է քննարկվող խնդրի սպեկտրում. հաճախականության փոխարկիչները թույլ են տալիս սահուն գործարկել էլեկտրական շարժիչը, առանց ցնցումների և ցնցումների: Մեկնարկային հոսանք ընդհանրապես չկա։ Փափուկ նախուտեստներԷլեկտրական շարժիչի փափուկ մեկնարկիչը նույն հաճախականության փոխարկիչն է, բայց սահմանափակ ֆունկցիոնալությամբ: Այն աշխատում է միայն այն դեպքում, երբ էլեկտրական շարժիչը արագանում է՝ սահուն կերպով փոխելով իր պտտման արագությունը սահմանված նվազագույն արժեքից մինչև անվանական: Էլեկտրական շարժիչի արագացման ավարտից հետո սարքի անօգուտ շահագործումը կանխելու համար մոտակայքում տեղադրվում է շրջանցող կոնտակտոր: Այն մեկնարկի ավարտից հետո էլեկտրական շարժիչը միացնում է անմիջապես ցանցին: Սարքավորումների արդիականացում կատարելիս սա ամենապարզ մեթոդն է։ Այն հաճախ կարելի է իրականացնել սեփական ձեռքերով՝ առանց բարձր մասնագիտացված մասնագետների ներգրավման։ Սարքը տեղադրված է մագնիսական մեկնարկիչի տեղում, որը վերահսկում է էլեկտրական շարժիչի մեկնարկը: Հնարավոր է, որ անհրաժեշտ լինի փոխարինել մալուխը պաշտպանված մալուխով: Այնուհետև էլեկտրական շարժիչի պարամետրերը մուտքագրվում են սարքի հիշողության մեջ, և այն պատրաստ է գործողության: Բայց ոչ բոլորն են կարող ինքնուրույն կարգավորել հաճախականության լիարժեք փոխարկիչները: Հետեւաբար, դրանց օգտագործումը միայնակ օրինակներում սովորաբար անիմաստ է: Հաճախականության փոխարկիչների տեղադրումն արդարացված է միայն ձեռնարկության էլեկտրական սարքավորումների ընդհանուր արդիականացում իրականացնելիս:
Շարժիչի փափուկ գործարկումը և դրա մեղմ արգելակումը կարող են զգալիորեն մեծացնել համակարգի ծառայության ժամկետը` շնորհիվ գերտաքացումից, ալիքներից և գործընթացներում ցնցումներից պաշտպանվելու: Հենց այդ նպատակով մշակվել է փափուկ մեկնարկի սարք կամ կարճ ասած՝ փափուկ մեկնարկիչ, որը կայունացնում է մեկնարկային բնութագրերը և ապահովում մեխանիզմի միատեսակ աշխատանքը։ Օգտագործելով փափուկ մեկնարկիչ, դուք կարող եք խուսափել էլեկտրական շարժիչի շահագործման մեջ բազմաթիվ խնդիրներից, ուստի կարևոր է իմանալ փափուկ մեկնարկիչի գործունեության նպատակը և սկզբունքը, հիմնական պարամետրերը, միացման և շահագործման նրբությունները:
Ինչպես է UPP-ն օգնումՇարժիչի գործարկման ժամանակ պտտվող մեխանիզմները կարող են կրկնապատկել իրենց անվանական արժեքը՝ առաջացնելով մեկնարկային հոսանքներ, որոնք մի քանի անգամ ավելի բարձր են, քան միջին աշխատանքային արժեքները:
Նման վերագործարկումները հղի են բազմաթիվ բարդություններով.
Փափուկ մեկնարկիչի ներկայացված լուսանկարները ցույց են տալիս, որ մեխանիզմը նման է մետաղական և պլաստիկ պատյանով պաշտպանված սխեմաների և լարերի հավաքածուի։ Փաստորեն, սարքը հիմնված է անջատիչ սարքավորումների, արգելակման բարձիկների, արգելափակողների, հակակշիռների և այլ տարրերի վրա, որոնք կարող են կայունացնել աշխատանքը։ էլեկտրական շարժիչ.
Մեխանիզմն ունի նաև լրացուցիչ ֆունկցիոնալություն.
Ե՞րբ է անհրաժեշտ SCP-ն:Որոշ մեքենաներ անմիջապես չեն պարզաբանում, որ իրենց պետք է հարթեցնող մեխանիզմ, բայց որքան շուտ ստեղծվի սահուն մեկնարկը, այնքան երկար և ավելի լավ կգործի ամբողջ համակարգը: Ցավոք, ամենից հաճախ մարդիկ մտածում են փափուկ մեկնարկիչը միացնելու մասին միայն այն դեպքում, երբ շարժիչն ինքնին ցույց է տալիս, որ մեկնարկային գործընթացները կործանարար են: Սա հասկանալու համար բավական է ըմբռնել ամենատարածված «ցուցիչ» իրավիճակներից մեկը.
Էլեկտրամատակարարումը չի կարող հաղթահարել չափազանց ծանր մեկնարկը: Օրինակ, ցանցն ի վիճակի չէ ապահովելու անհրաժեշտ էներգիան կամ ապահովում է արտադրություն a առավելագույն մակարդակներըգործում է, լույսերն անջատվում են, միանում անջատիչներ, որոշ կոնտակտորներ, ռելեներ և գեներատոր հրաժարվում են գործարկել:
Էլեկտրական շարժիչի խափանումը կանխելու համար խորհուրդ է տրվում հնարավորինս շուտ կարգավորել համակարգի սահուն մեկնարկը և արգելակումը: Դա անելը դժվար չէ, քանի որ նույնիսկ սկսնակը կարող է ընտրել, տեղադրել և միացնել փափուկ մեկնարկիչը իր սեփական ձեռքերով:
Ինչպես ընտրել փափուկ մեկնարկիչՀարցը, թե ինչպես ընտրել փափուկ մեկնարկիչ, բավականին հաճախ է առաջանում, քանի որ մեխանիզմը ընտրվում է կոնկրետ էլեկտրական շարժիչի և էներգիայի աղբյուրի համար:
Պարամետրերի և հնարավորությունների հետ սխալներ թույլ չտալու համար խորհուրդ է տրվում ուշադրություն դարձնել հետևյալ ցուցանիշներին.
Հիմնական բանը այն է, որ softstarter-ի համար առաջադրված պահանջները համապատասխանում են չափանիշներին, աշխատանքային պայմաններին, շարժիչի հզորությանը և անվանական ցանցի արժեքներին: Շատ մատակարարների կողմից առաջարկվող առանցքային աղյուսակները և հաշվարկման ալգորիթմները նույնպես կօգնեն ընտրել հարմար սարքի ավելի հարմար և որակյալ որոնման համար:
Ինչպես միացնել և կարգավորելՊարամետրը որոշվում է շարժիչին փափուկ մեկնարկը միացնելու համապատասխան սխեմայով: Ստանդարտը համարվում է մագնիսական մեկնարկիչի, ջերմային ռելեի, արագընթաց ապահովիչների և հոսանք կարգավորող մեքենաների օգտագործումը:
Փափուկ մեկնարկիչը ճիշտ միացնելու համար դուք պետք է հստակ հետևեք գծապատկերներին, որտեղ հստակ նշված են բոլոր կարևոր կետերը.
Փափուկ մեկնարկիչը կարող է հեշտությամբ օգնել զգալիորեն երկարացնել էլեկտրական շարժիչի ծառայության ժամկետը՝ միաժամանակ նվազեցնելով հարակից ծախսերը և ավելացնելով արտադրվող հզորությունը՝ առանց մեքենային վնասելու: Մեխանիզմի աշխատանքը կայունացնելը, բեռները վերահսկելը և ընթացիկ գործընթացները կարգավորելը, այս ամենը կդառնա անփոխարինելի օգնականդժվար մեկնարկային խնդիրների լուծման մեջ:
Soft starter-ի լուսանկարը
Թվարկված շարժիչներից որևէ մեկը էլեկտրական շարժիչի մաս է, որը նախատեսված է օգտակար բեռի հետ հաղորդակցվելու համար: Կախված ծանրաբեռնվածությունից, շարժիչն անջատվում է, այնուհետև վերագործարկվում: Հաջորդը, մենք ավելի մանրամասն կխոսենք այն մասին, թե ինչ է տեղի ունենում էլեկտրական շարժիչը գործարկելիս և ինչպես օպտիմալացնել այս գործընթացը: Ինչ է տեղի ունենում ասինխրոն շարժիչը գործարկելիսՀասկանալու համար, թե որ սարքից պետք է փափուկ գործարկել էլեկտրական շարժիչը, դուք պետք է իմանաք դրա աշխատանքի սկզբունքը: Ամենատարածված շարժիչները ասինխրոն են squirrel-cage ռոտոր. իրենց պարզ դիզայնև համապատասխան հուսալիությունը որոշեց դրանց ժողովրդականությունը էլեկտրական մեքենաներ. Չնայած ռոտորը պտտվում է, և դրա ձևը օպտիմիզացված է այս գործընթացի համար, դա ոչ այլ ինչ է, քան տրանսֆորմատորի երկրորդական ոլորուն: Եվ, ինչպես գիտեք, եթե առաջնային ոլորուն հոսում է հոսանք, ապա դրա միջուկում էլեկտրամագնիսական դաշտ է հայտնվում։ Թվարկված գործառույթները ասինխրոն շարժիչում կատարվում են ստատորի կողմից: Նրա մագնիսական դաշտը, որը, ի տարբերություն տրանսֆորմատորի, պտտվում է ռոտորի շուրջը, առաջացնում է հոսանքներ՝ կապված այս պտույտի հետ։ Եվ որքան մեծ է դաշտի և ռոտորի արագությունների տարբերությունը, այնքան մեծ է հոսանքը վերջինիս մեջ։ Ի վերջո, ռոտորը կարճ միացված ոլորուն է: Եվ քանի որ կա տրանսֆորմատորային կապ, նշանակում է, որ ոլորունների հոսանքները ուղիղ համեմատական են: Այժմ մենք թվարկում ենք այն պայմանները, որոնք առկա են արդյունաբերական ցանցից սնվող ասինխրոն շարժիչը գործարկելու ժամանակ: Նախ, եկեք նայենք երեք փուլային տարբերակին.
Ասինխրոն շարժիչը էլեկտրական ցանցին միացնելը ակնթարթորեն ստեղծում է պտտվող մագնիսական դաշտ: Այս դեպքում դրա և ռոտորի արագության տարբերությունը (այսպես կոչված սայթաքում, արտահայտված որպես պտտման արագության տոկոս էլեկտրամագնիսական դաշտստատոր) առավելագույնն է: Եվ, դրա հետևանքով, դա նման է տրանսֆորմատորի կարճ միացման ռեժիմին: Եթե շարժիչի հզորությունը բարձր է, ապա մեկնարկային հոսանքները գտնվում են այն մակարդակի վրա, որը համարվում է վթարային նմանատիպ էլեկտրական հզորության տրանսֆորմատորների համար: Ինչ սարք օգտագործել դրանք սահմանափակելու համար, միանգամայն պարզ է: Այն պետք է.
Փաթաթման շրջանի միացումՌոտորը կարող է շարժվել միայն որոշակի էլեկտրական շարժիչներով: Այդ իսկ պատճառով այս մեթոդը բնորոշ չէ։ Դրանից մնում են երկուսը, որոնցից առաջինն ամենաշատ կիրառվողն է։ Բայց առանց կորուստների լարման անկում ստանալն այնքան էլ հեշտ չէ։ Եռաֆազ շղթայում դա կարելի է անել՝ անցում կատարելով եռանկյունից աստղի և հետ: Շարժիչի ստատորի ոլորունների վրա կիրառվող գծային լարումն ավելին է ապահովում բարձր արդյունավետություն. Բայց եռանկյունի շղթայում մեկնարկային հոսանքն ավելի մեծ է: Հետևաբար, աստղային միացումին անցնելը թույլ է տալիս զգալիորեն նվազեցնել ասինխրոն շարժիչի մեկնարկային հոսանքը: Սա ամենապարզ մեթոդն է համեմատաբար հարթ մեկնարկի համար: Այն օգտագործում է նվազագույն թվով լրացուցիչ տարրեր, քանի որ լարման անկումը ստեղծվում է հենց եռաֆազ էլեկտրական ցանցի հնարավորություններով: Այս տարրերը անջատիչներ են, և գծապատկերն ինքնին ներկայացված է ստորև: Բայց այդպիսին պարզ միացումկիրառելի է միայն եռաֆազ ցանց. IN միաֆազ տարբերակՖազային լարումից ցածր արդյունավետ լարում չկա:
Օգտագործելով ռեզիստորներՇարժիչի հնարավորինս սահուն արագացում ստանալու համար անհրաժեշտ է օգտագործել համապատասխան լարման անկում ապահովող տարրեր։ Այդ նպատակով օգտագործվում են հետևյալը.
Այս մեթոդները հարմար են ինչպես եռաֆազ, այնպես էլ միաֆազ ցանցերի համար: Ամեն դեպքում, դուք ստիպված կլինեք օգտագործել անջատիչներ, քանի որ ինչ-որ պահի ձեզ անհրաժեշտ կլինի շարժիչը ուղղակիորեն միացնել ցանցին: Ռեզիստորներով շղթան ամենակոմպակտն է: Այնուամենայնիվ, քանի որ շարժիչի հզորությունը մեծանում է, համապատասխանաբար մեծանում է նաև մեկնարկային ռեզիստորների հզորությունը: Հաշվի առնելով այն հանգամանքը, որ դրանք ջեռուցվում են, գործարկման ժամանակը պետք է լինի իրենց թույլատրելի ջերմաստիճանի սահմաններում: Հակառակ դեպքում, գերտաքացման պատճառով դիմադրիչները կդառնան անօգտագործելի: Ռեզիստորների օգտագործմամբ փափուկ մեկնարկի սխեման ներկայացված է ստորև:
Ինդուկտորների օգտագործումըԵթե դուք կլոնավորեք շղթան, կարող եք փափուկ մեկնարկ ստանալ՝ օգտագործելով զուգահեռաբար միացված դիմադրիչների մի քանի խմբեր, ինչը կթեթևացնի դրանց ջերմային բեռը: Բայց փափուկ մեկնարկի ժամանակի ավելացումը կուղեկցվի այս ռեզիստորներում էներգիայի կորուստների ավելացմամբ: Այդ պատճառով ռեզիստորների փոխարեն օգտագործվում են ինդուկտիվ տարրեր: Ամենապարզ դեպքում դրանք խեղդուկներ են։ Սա ավելի ծանր ու թանկ լուծում է, սակայն շարժիչների հաճախակի վերագործարկման պատճառով էներգիայի կորուստները նվազեցնելու համար անհրաժեշտ է օգտագործել այն։ Արտաքին տեսքՀզոր ասինխրոն շարժիչի ռեակտորը ներկայացված է ստորև:
Եթե գործարկման ժամանակ օգտագործվող ինդուկտիվությունը պատրաստված է ավտոտրանսֆորմատորի տեսքով, շարժվող կոնտակտի միջոցով, որը շարժվում է ոլորուն շրջադարձերի երկայնքով, կարող եք կամ օպտիմալ կերպով կարգաբերել մեկնարկային գործընթացը կամ կառավարել այն՝ շարժվող կոնտակտը տեղափոխելով: Այս տարբերակի թերությունը մեխանիկական շփման ժամանակ անխուսափելի կայծն է: Այդ իսկ պատճառով այն կիրառելի է միայն համեմատաբար ցածր շարժիչի հզորության դեպքում: Ռեակտորներով և ավտոտրանսֆորմատորներով փափուկ մեկնարկիչների սխեմաները ներկայացված են ստորև:
Փափուկ մեկնարկի սխեմաներ. ա) ռեակտորներով. բ) ավտոտրանսֆորմատորներով. 1, 2 և 3 – անջատիչներ, որոնք կառավարում են անջատումը Սահուն մեկնարկի համար առանց ավտոտրանսֆորմատորներին բնորոշ թերությունների իրենց շարժվող կոնտակտով, օգտագործվում են մագնիսական ուժեղացուցիչներ: Նրանք օգտագործում են մագնիսացում, որը թույլ է տալիս փոխել ինդուկտիվ ռեակտիվության արժեքը: Մագնիսական ուժեղացուցիչների դիզայնը բավականին բազմազան է: Բայց նրանց հիմնական առավելությունը ցածր հոսանքն է և, համապատասխանաբար, հսկողության համար օգտագործվող հզորությունը: Նրանք չունեն հսկիչ կոնտակտներ, որոնց միջոցով մեծ հոսանքներ են հոսում: Դիագրամներից մեկը ներկայացված է ստորև:
Վերքի ռոտորի շարժիչԱսինխրոն էլեկտրական շարժիչի համար նախատեսված բոլոր փափուկ մեկնարկային սարքերը օգտագործվում են ստատորի կողմից: Բայց երբ մշտական վերագործարկումը շարժիչի համար նորմալ գործառնական գործընթաց է, նրա դիզայնը փոխվում է, դարձնելով ռոտորի փուլը: Սա կառուցողական լուծումհնարավորություն է տալիս ավելի արդյունավետ կերպով կարգավորել շարժիչի արագացման ժամանակ առաջացող հոսանքները: Վնասվածքային ռոտորային շարժիչի համար փափուկ մեկնարկիչ սարքի շահագործման նախագիծը և առաջարկությունները ներկայացված են ստորև.
Կիսահաղորդչային անջատիչների կիրառումԹվարկված բոլոր փափուկ նախուտեստները օգտագործվել են երկար տարիներ: Նրանք ունեն կարևոր հատկություն, որը նրանց դուրս է դնում մրցակցությունից: Այս սարքերը չունեն էլեկտրական պարամետրեր, որի գերազանցումը հանգեցնում է դիմադրության անհետացման (խաթարման): Հետեւաբար, դրանք ամենահուսալին են, թեեւ հնացած են։ Ժամանակակից սարքերփափուկ մեկնարկը օգտագործում է կառավարվող կիսահաղորդչային անջատիչներ (թրիստորներ և տրանզիստորներ): Սա այսպես կոչված իմպուլսի լայնության կարգավորումն է: Անջատիչը ժամանակի ընթացքում անջատում է սինուսոիդային լարման մի մասը: Արդյունքում միջին լարման արժեքը կարող է փոխվել զրոյից մինչև արդյունավետ 220 Վ։ Հետևաբար, կիսահաղորդչային անջատիչն ապահովում է առավելագույնը։ արդյունավետ տարբերակէլեկտրական շարժիչի համար փափուկ մեկնարկի սարք ստեղծելու համար: Բայց միևնույն ժամանակ, անջատիչը ենթակա է ինչպես ջերմային խզման, այնպես էլ նմանատիպ ազդեցությունների՝ ավելորդ լարման և հոսանքի ամպլիտուդների պատճառով: Հետևաբար, բանալին պետք է արդյունավետորեն սառեցվի և ընտրվի շարժիչի աշխատանքային պայմանների համաձայն:
Զարկերակային լայնության կարգավորում ունեցող սարքերը կիրառելի են ցանկացած ցանցում՝ անկախ փուլերի քանակից: Նման դիագրամը ներկայացված է ստորև: Ռոտորի արագացումից հետո կոնտակտները փակվում են և պաշտպանում բանալիները հոսանքի և լարման ալիքների վնասումից:
Կոմուտատորի էլեկտրական շարժիչների սահուն մեկնարկըՉնայած ասինխրոն շարժիչների համեմատ դիզայնի հիմնարար տարբերություններին, կոմուտատորների շարժիչների գործարկումը ուղեկցվում է նաև մեծ արմատուրային հոսանքով, որը ռոտորն է: Ըստ էության, սա խեղդուկների հավաքում է դրանցից յուրաքանչյուրի հաջորդական անջատումով: Որքան երկար է լարումը ենթարկվում կոլեկտորային լամելային, ինչը տեղի է ունենում անմիջապես միացնելուց և լարումը կիրառելուց հետո, այնքան ավելի ուժեղ է միջուկի մագնիսացումը և այնքան մեծ է այն արժեքը, որին հաջողվում է հասնել հոսանքին: Երբ ստատորը նախագծված է որպես մշտական մագնիս, միայն արմատուրին անհրաժեշտ է էներգիայի աղբյուր: Բայց այս դեպքում նրա լարվածությունը կարող է լինել միայն մշտական։ Այս աղբյուրով աշխատող փափուկ մեկնարկիչը պատրաստված է միայն այն տարրերի վրա, որոնք կարող են ստեղծել մշտական լարման անկում: Այս տարրերն են.
Եթե ստատորը նախագծված է որպես էլեկտրամագնիս, դա նշանակում է, որ շարժիչը կարող է աշխատել փոփոխական լարման վրա: Վերոնշյալով, նույն ժամանակի փորձարկված փափուկ մեկնարկիչները, որոնք կիրառելի են միաֆազների համար, հարմար են կոմուտատորների շարժիչների համար: ասինխրոն շարժիչներ:
Եվ նաև ժամանակակից տեխնիկական լուծումներկիսահաղորդչային անջատիչների հիման վրա: Նրանց պատկերները նման են վերևում արդեն ցուցադրվածներին: Էլեկտրամագնիսական գրգռման առկայության դեպքում ոլորուն կարելի է միացնել խարիսխին կամ հաջորդաբար կամ զուգահեռաբար: Սերիական կապանվտանգ, քանի որ էլեկտրական միացումընդհանուր հոսք էլեկտրական հոսանք. Դրա խզումը կամ հոսանքի աղբյուրին միացումը առաջացնում է շարժիչի ոլորունների հոսանքի միաժամանակյա փոփոխություն: Բայց զուգահեռ կապի դեպքում հնարավոր են սցենարներ։ Եթե շարժիչի վրա լարման կիրառման ժամանակ դաշտի ոլորուն հոսանքազրկվում է, իսկ խարիսխը միացված է, պայմաններ կստեղծվեն շարժիչի փախուստի կոչվող երևույթի համար: Միևնույն ժամանակ, ռոտորը, փորձելով ձգվել դեպի ստատորի երկաթը, պտտվում և արագանում է ավելի ու ավելի արագ: Եթե ռոտորի ստեղծածից ավելի բեռնվածքի մոմենտը չի կիրառվում լիսեռի վրա, արագացումը կարող է շարունակվել մինչև ռոտորի ոչնչացումը: Տարածումից պաշտպանվելու համար անհրաժեշտ է.
Սինխրոն շարժիչի սահուն մեկնարկՍինխրոն շարժիչները, որոնք աշխատում են էլեկտրական ցանցից ցանկացած քանակությամբ փուլերով, արագացվում են որպես ասինխրոն շարժիչներ՝ օգտագործելով սայթաքում: Այնուհետև, ռոտորը վերածելով ստատորից անկախ մագնիսի, հավասարեցվում են ստատորի և ռոտորի դաշտերի պտտման արագությունները։ Այդ պատճառով համաժամանակյա շարժիչների համար օգտագործվող փափուկ մեկնարկիչները նույնն են, ինչ ասինխրոնների համար: Որոշ տարբերակիչ մանրամասներ՝ կախված ռոտորի սնուցման աղբյուրից, կարելի է տեսնել նկարում.
ԵզրակացություններIN ընդհանուր սարքերԲոլոր տեսակի էլեկտրական շարժիչների փափուկ մեկնարկը նման են և հիմնված են նույն սխեմաների և տարրերի վրա: Ընտրությունը պետք է կատարվի հատուկ պայմանների համար՝ հիմնվելով հիմնականում շարժիչի հզորության վրա: Բայց ժամանակակից կիսահաղորդչային անջատիչները հնարավորություն են տալիս ապահովել հզորությունների լայն շրջանակ լավագույն պարամետրերըհարթ մեկնարկ: Հետեւաբար, իմաստ ունի նախ ընտրել դրանք: Ձեռքի էլեկտրական գործիքների խափանումները, որոնք երբեմն տեղի են ունենում. հղկման մեքենաներ, էլեկտրական փորվածքներև ոլորահատ սղոցները հաճախ կապված են իրենց բարձր մեկնարկային հոսանքի և փոխանցման տուփի մասերի զգալի դինամիկ բեռների հետ, որոնք առաջանում են շարժիչի հանկարծակի գործարկման ժամանակ: Առաջարկվող սարքի դիագրամը ներկայացված է նկարում: XP1 վարդակից ներառված է հոսանքի վարդակիցև տեղադրեք XS1 վարդակից ցանցի վարդակիցէլեկտրական գործիքներ. Դուք կարող եք զուգահեռաբար տեղադրել և միացնել մի քանի վարդակներ գործիքների համար, որոնք աշխատում են հերթափոխով: Կ.Մորոզ, Նադիմ, Յամալ-Նենեց ինքնավար օկրուգ ԳՐԱԿԱՆՈՒԹՅՈՒՆ |
 Բեռի տակ ներխուժման հոսանքները ավելի բարձր են, քան պարապ վիճակում: Շարժիչով շարժիչ մեխանիզմից պտտվող մեխանիկական դիմադրությունը ավելացվում է ռոտորի քաշին: Գործնականում նրանք փորձում են նվազագույնի հասցնել այս գործոնի ազդեցությունը։ Օրինակ, հզոր երկրպագուների համար օդային խողովակների կափույրներն ավտոմատ կերպով փակվում են գործարկման պահին:
Բեռի տակ ներխուժման հոսանքները ավելի բարձր են, քան պարապ վիճակում: Շարժիչով շարժիչ մեխանիզմից պտտվող մեխանիկական դիմադրությունը ավելացվում է ռոտորի քաշին: Գործնականում նրանք փորձում են նվազագույնի հասցնել այս գործոնի ազդեցությունը։ Օրինակ, հզոր երկրպագուների համար օդային խողովակների կափույրներն ավտոմատ կերպով փակվում են գործարկման պահին: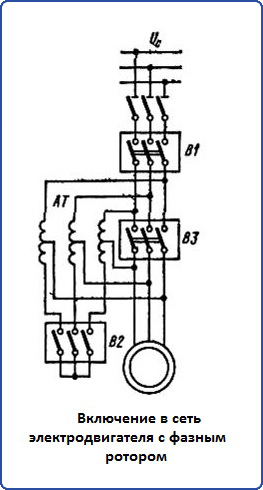 Վնասվածքային ռոտորով ասինխրոն էլեկտրական շարժիչների օգտագործումը աշխատանքային դժվարին պայմաններով աշխատանքային տարածքներում մեկնարկային հոսանքների կրճատման ամենահին ձևն է: Առանց դրանց անհնար է էլեկտրաֆիկացված կռունկների, էքսկավատորների, ինչպես նաև ջարդիչների, էկրանների և ջրաղացների շահագործումը, որոնք հազվադեպ են սկսվում, երբ շարժիչ մեխանիզմում արտադրանք չկա:
Վնասվածքային ռոտորով ասինխրոն էլեկտրական շարժիչների օգտագործումը աշխատանքային դժվարին պայմաններով աշխատանքային տարածքներում մեկնարկային հոսանքների կրճատման ամենահին ձևն է: Առանց դրանց անհնար է էլեկտրաֆիկացված կռունկների, էքսկավատորների, ինչպես նաև ջարդիչների, էկրանների և ջրաղացների շահագործումը, որոնք հազվադեպ են սկսվում, երբ շարժիչ մեխանիզմում արտադրանք չկա: Ցանկացած եռաֆազ էլեկտրական շարժիչի brno-ում (ոլորուն մեկնարկի բաշխման բլոկում) կա 6 տերմինալ բոլոր փուլերի ոլորուններից: Այսպիսով, դրանք կարող են միացվել կամ աստղի կամ եռանկյունու մեջ:
Ցանկացած եռաֆազ էլեկտրական շարժիչի brno-ում (ոլորուն մեկնարկի բաշխման բլոկում) կա 6 տերմինալ բոլոր փուլերի ոլորուններից: Այսպիսով, դրանք կարող են միացվել կամ աստղի կամ եռանկյունու մեջ:





































































Հանրաճանաչ.
Աֆորիզմներ և մեջբերումներ ինքնասպանության մասին
|
Նոր
- Ձմեռային բանաստեղծական մեջբերումներ երեխաների համար
- Ռուսաց լեզվի դաս «փափուկ նշան գոյականների ֆշշոցից հետո»
- Առատաձեռն ծառը (առակ) Ինչպես երջանիկ ավարտ ունենալ հեքիաթի առատաձեռն ծառը
- Դասի պլան մեզ շրջապատող աշխարհի վերաբերյալ «Ե՞րբ է գալու ամառը» թեմայով:
- Արևելյան Ասիա. երկրներ, բնակչություն, լեզու, կրոն, պատմություն Լինելով մարդկային ռասաները ցածր և բարձրերի բաժանելու կեղծ գիտական տեսությունների հակառակորդը, նա ապացուցեց ճշմարտությունը.
- Զինվորական ծառայության համար պիտանիության կատեգորիաների դասակարգում
- Մալոկլյուզիան և բանակը Մալոկլյուզիան չի ընդունվում բանակում
- Ինչու եք երազում կենդանի մեռած մոր մասին. երազանքի գրքերի մեկնաբանություններ
- Կենդանակերպի ո՞ր նշանների ներքո են ծնվել ապրիլին.
- Ինչու՞ եք երազում փոթորիկի մասին ծովի ալիքների վրա:




