Vietnes sadaļas
Redaktora izvēle:
- Kā aprēķināt griezes momentu
- Solu attīrīšanas metodes: dialīze, elektrodialīze, ultrafiltrācija
- “Tīrā māksla”: F.I. Tjutčevs. “Tīrās mākslas” dzeja: tradīcijas un inovācijas Tīrās mākslas pārstāvji krievu literatūrā
- Kā pagatavot liellopa mēli mājās
- Receptes dzērveņu pagatavošanai mājās Dzērveņu ēdienu receptes cepšana
- Cepeškrāsnī cepts lasis
- Poliūrija Šo pētījumu mērķis ir identificēt
- Galvaspilsētas skolas ir gatavas jaunajam mācību gadam
- Kāpēc sapnī redzēt peles?
- Sapņo staigāt pa jūru. Kāpēc tu sapņo par jūru? Sapņa interpretācija par peldēšanu jūrā. Nelīdzena jūra sapnī
Reklāma
| Kā aprēķināt griezes momentu. I.4.2. Rotācijas kustības dinamikas pamatlikums Leņķiskā paātrinājuma formula caur inerces momentu |
|
Ņemot vērā translācijas un rotācijas kustības, mēs varam izveidot analoģiju starp tām. Translācijas kustības kinemātikā tiek izmantots ceļš s, ātrums
un paātrinājums A. To lomu rotācijas kustībā spēlē griešanās leņķis , leņķiskais ātrums un leņķiskais paātrinājums ε. Translācijas kustības dinamikā tiek izmantoti spēka un masas jēdzieni T un impulsu Spēka darbs translācijas kustības laikā. JaudaĻaujiet ķermenim (materiālam punktam) pastāvīgā spēka iedarbībā A= Fl· cos = F l l, (1) Tagad aplūkosim vispārējo darba aprēķināšanas gadījumu, kad ķermenis pārvietojas translācijas ceļā pa izliektu ceļu mainīga spēka ietekmē. Pa ceļam l atlasiet elementāru sadaļu dl, kurā var uzskatīt spēku
Ikona l ar integrālu nozīmē, ka integrācija tiek veikta visā ceļā l. Formulai (2) var piešķirt citu formu, ja mēs izmantojam vektoru skalāro reizinājumu. Tad integrands dA tiks rakstīts šādā formā: dA
=
F·
dl·
cos=
No formulas (1) ir skaidrs, ka darbs ir algebrisks lielums. Darba zīme ir atkarīga no leņķa . Ja leņķis ir akūts, tad cos > 0 un darbs ir pozitīvs, bet, ja leņķis ir neass, darbs ir negatīvs. SI darba vienība ir džouls (J). To ievada no formulas (1), kurā pieņemts, ka cos = 1 ir 1 J darbs, ko veic ar 1 N spēku uz 1 m gara ceļa, ja spēka un pārvietošanās virzieni sakrīt. Lai raksturotu darba ātrumu, tiek ieviests jaudas jēdziens, kas vienāds ar paveikto darbu laika vienībā. Ja elementārs laika periods dt elementārs darbs ir padarīts dA, tad jauda R vienāds ar
SI vienībās jaudu mēra vatos (W). Kā izriet no (4), 1 W = 1 J / 1 s, t.i. 1 W- Šī ir jauda, ar kuru 1 s tiek paveikts 1 J darbs. Spēka darbs rotācijas kustības laikāApsveriet stingru ķermeni, kas mainīga spēka ietekmē
Darbs būs pozitīvs, ja spēka tangenciālās sastāvdaļas virziens sakrīt ar griešanās virzienu, un negatīvs, ja tie ir pretējā virzienā. Lekcijas konspekts Inerces moments. Spēka mirklis. Rotācijas kustības dinamikas pamatvienādojums. Impulsa moments. Leņķiskā impulsa saglabāšanas likums. Darbs un kinētiskā enerģija rotācijas kustības laikā.
Apsverot rotācijas kustību, ir jāievieš jauni fizikāli jēdzieni: inerces moments, spēka moments, impulsa moments. Inerces moments ir ķermeņa inerces mērs ķermeņa rotācijas kustības laikā. Inerces moments materiāla punkta vērtība attiecībā pret fiksētu griešanās asi ir vienāda ar tā masas reizinājumu ar attāluma kvadrātu līdz apskatāmajai rotācijas asi (1. att.):
Inerces moments ir skalārs un aditīvs lielums, tāpēc ķermeņa inerces moments ir vienāds ar visu tā punktu inerces momentu summu:
Nepārtraukta masas sadalījuma gadījumā šī summa tiek samazināta līdz integrālim:
kur ir neliela ķermeņa tilpuma masa Inerces moments ir masas analogs rotācijas kustības laikā. Jo lielāks ir ķermeņa inerces moments, jo grūtāk ir mainīt rotējošā ķermeņa leņķisko ātrumu. Inerces momentam ir jēga tikai noteiktā rotācijas ass pozīcijā. Nav jēgas runāt vienkārši par "inerces momentu". Tas ir atkarīgs: 1) no rotācijas ass stāvokļa; 2) no ķermeņa masas sadalījuma attiecībā pret rotācijas asi, t.i. par ķermeņa formu un tā izmēru. Eksperimentāls pierādījums tam ir eksperiments ar rites cilindriem.
Integrējot dažiem viendabīgiem ķermeņiem, varam iegūt šādas formulas (rotācijas ass iet caur ķermeņa masas centru). Stīpas (mēs neņemam vērā sienas biezumu) vai doba cilindra inerces moments: Diska vai cieta cilindra ar rādiusu R inerces moments:
Bumbiņas inerces moments Stieņa inerces moments
E Kur d attālums no masas centra PAR uz rotācijas asi (2. att.). Masas centrs- iedomāts punkts, kura novietojums raksturo dotā ķermeņa masas sadalījumu. Ķermeņa masas centrs pārvietojas tāpat kā materiāls punkts ar tādu pašu masu visu ārējo spēku ietekmē, kas iedarbojas uz konkrēto ķermeni. Inerces momenta jēdzienu mehānikā ieviesa pašmāju zinātnieks L. Eilers 18. gadsimta vidū, un kopš tā laika to plaši izmanto daudzu stingrās ķermeņa dinamikas problēmu risināšanā. Inerces momenta vērtība ir jāzina praksē, aprēķinot dažādas rotējošas sastāvdaļas un sistēmas (spararati, turbīnas, elektromotoru rotori, žiroskopi). Inerces moments ir iekļauts ķermeņa (kuģa, lidmašīnas, šāviņa u.c.) kustības vienādojumos. To nosaka, kad vēlas uzzināt gaisa kuģa rotācijas kustības parametrus ap masas centru ārēja traucējuma (vēja brāzma u.c.) ietekmē. Vērojot sarežģītas kustības, piemēram, cilvēka ķermeņa kustību (ejot, skrienot, lecot utt.), šķiet grūti vai pat neiespējami aprakstīt visu tās punktu kustību. Taču, analizējot šādas kustības, var pamanīt, ka tās sastāv no vienkāršākām - translācijas un rotācijas kustībām. Translācijas kustības mehānika lasītājam ir zināma, tāpēc sadaļa sākas ar rotācijas kustības apsvēršanu. Vienkāršākā ir stingra ķermeņa rotācija ap fiksētu asi. Šis gadījums ļauj iepazīties ar rotācijas kustības specifiku, terminoloģiju un likumiem. 5.1. ABSOLŪTI CIEGA ĶERMEŅA ROTĀCIJAS KUSTĪBAS KINEMĀTIKA AP FIKSĒTU ASI Absolūti stingrs ķermenis ir tāds, kura attālums starp jebkuriem diviem punktiem ir nemainīgs. Absolūti stingra korpusa izmēri un forma kustoties nemainās. Jēdziens “absolūti stingrs ķermenis” ir fiziska abstrakcija, jo jebkurš ķermenis spēj deformēties. Tomēr daudzos gadījumos deformāciju var neievērot. Vienkāršākais absolūti stingra ķermeņa rotācijas kustības gadījums ir rotācija ap fiksētu asi. Šī ir kustība, kurā ķermeņa punkti pārvietojas pa apļiem, kuru centri atrodas uz taisnas līnijas, ko sauc par rotācijas asi. Ir zināms, ka dažos gadījumos, lai raksturotu ķermeņa kustību, nav nepieciešams norādīt visu tā punktu kustību; tā, piemēram, translācijas kustībā pietiek norādīt jebkura viena ķermeņa punkta kustību. Rotācijas kustības laikā ap asi ķermeņa punkti pārvietojas pa dažādām trajektorijām, bet tajā pašā laikā visi punkti un pats ķermenis griežas vienā leņķī. Rotācijas raksturlielumiem uzzīmējiet plaknē, kas ir perpendikulāra asij, rādiusa vektoru uz noteiktu punktu i(5.1. att.). Rādiusa vektora griešanās leņķa α atkarība no laika attiecībā pret kādu izvēlēto virzienu OX ir stingra ķermeņa rotācijas kustības vienādojums ap fiksētu asi: Ķermeņa griešanās ātrumu raksturo leņķiskais ātrums, kas vienāds ar rādiusa vektora griešanās leņķa pirmo atvasinājumu attiecībā pret laiku: Leņķiskais ātrums ir vektors, kas ir vērsts pa griešanās asi un ir saistīts ar griešanās virzienu ar labās skrūves likumu (5.2. att.). Leņķiskā ātruma vektors, atšķirībā no ātruma un spēka vektoriem, ir slīdošs: tam nav noteikta pielietojuma punkta, un tas var atrasties jebkurā vietā uz rotācijas ass. Tādējādi, norādot vektoru ω, tiek norādīts rotācijas ass stāvoklis, griešanās virziens un leņķiskā ātruma lielums.
Leņķiskā ātruma izmaiņu ātrumu raksturo leņķiskais paātrinājums, kas vienāds ar pirmo leņķiskā ātruma atvasinājumu attiecībā pret laiku: vai vektora formā: No (5.4) ir skaidrs, ka leņķiskā paātrinājuma vektors virzienā sakrīt ar elementārām, diezgan nelielām leņķiskā ātruma vektora dω izmaiņām: ar paātrinātu rotāciju leņķiskais paātrinājums ir vērsts tajā pašā virzienā kā leņķiskais ātrums, ar lēnu griešanos - pretējā virzienā. Tā kā absolūti stingra ķermeņa visu punktu leņķiskā nobīde ir vienāda, tad saskaņā ar (5.2) un (5.3) tajā pašā laikā visiem ķermeņa punktiem ir vienāds leņķiskais ātrums un vienāds leņķiskais paātrinājums. Lineārie raksturlielumi - pārvietojums, ātrums, paātrinājums - dažādiem punktiem ir atšķirīgi. Norādīsim skalārā formā neatkarīgi atvasināmo attiecību starp lineārajiem un leņķiskajiem raksturlielumiem i-tam punktam, kas pārvietojas pa rādiusa apli r i:
Rīsi. 5.3
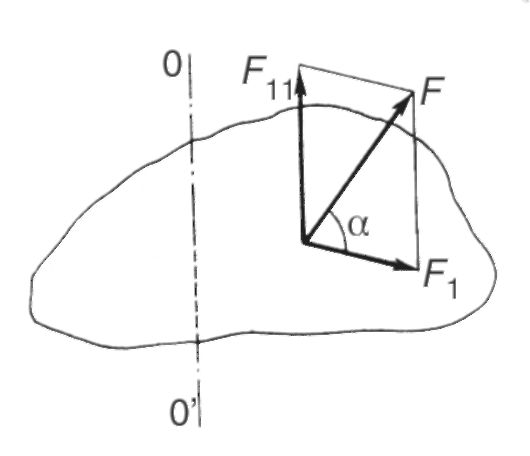
Noslēgumā mēs piedāvājam stingra ķermeņa rotācijas kustības ap fiksētu asi kinemātikas formulas, kas iegūtas, integrējot atbilstošās izteiksmes: vienmērīgas rotācijas kustības vienādojums[cm. (5.2)]: leņķiskā ātruma atkarība no laika vienmērīgā rotācijas kustībā[cm. (5.3)]: vienmērīgi mainīgas rotācijas kustības vienādojums[cm. (5.1) un (5.6)]: Ir lietderīgi šīs formulas salīdzināt ar līdzīgām translācijas kustības atkarībām. 5.2. PAMATJĒDZIENI. ROTĀCIJAS KUSTĪBAS DINAMIKAS VIENĀDOJUMS Spēka brīdis_ Ļaujiet uz kādu brīdi i spēks, kas pielikts cietam ķermenim F^, guļus plaknē, kas ir perpendikulāra rotācijas asij (5.4. att.). Spēka moments attiecībā pret griešanās asi ir punkta i rādiusa vektora un spēka vektorreizinājums: Paplašinot to, varat rakstīt: Kur β - leņķis starp vektoriem r i Un F i . Kopš spēka pleca h i = r i sinβ (skat. 5.4. att.), tad Ja spēks iedarbojas noteiktā leņķī α pret griešanās plakni (5.5. att.), tad to var sadalīt divās komponentēs. Viens no tiem atrodas plaknē, kas ir perpendikulāra griešanās asij, bet otrs ir paralēls šai asij un neietekmē korpusa griešanos (reālajā gadījumā tas iedarbojas tikai uz gultņiem). Turklāt tiks ņemti vērā tikai tie spēki, kas atrodas plaknē, kas ir perpendikulāra rotācijas asij.
Rīsi. 5.4
Rīsi. 5.5 Darbs rotācijas kustībā Ļaujiet zem spēka iedarbības F i(skat. 5.4. att.) korpuss griežas caur pietiekami mazu leņķi dα. Atradīsim šī spēka paveikto darbu. No vidusskolas zināmā spēka darba izteiksme šajā gadījumā jāraksta šādi:
Tātad, spēka elementārais darbs rotācijas kustībā ir vienāds ar spēka momenta un ķermeņa elementārā griešanās leņķa reizinājumu. Ja uz ķermeni iedarbojas vairāki spēki, tad to visu veikto elementāro darbu nosaka līdzīgi kā (5.12): Kur M- visu ārējo spēku kopējais moments, kas iedarbojas uz ķermeni. Ja, ķermenim griežoties, rādiusa vektora pozīcija mainās no α 1 uz α 2, tad ārējo spēku darbu var atrast, integrējot izteiksmi (5.13): Inerces moments Ķermeņu inerces mērs translācijas kustības laikā ir masa. Ķermeņu inerce rotācijas kustības laikā ir atkarīga ne tikai no masas, bet arī no tās sadalījuma telpā attiecībā pret asi. Ķermeņa inerces mēru rotācijas laikā raksturo ķermeņa inerces moments attiecībā pret rotācijas asi. Vispirms norādīsim uz to Materiāla punkta inerces moments attiecībā pret rotācijas asi ir vērtība, kas vienāda ar punkta masas reizinājumu ar tā attāluma no ass kvadrātu: Ķermeņa inerces moments attiecībā pret asi ir visu ķermeni veidojošo materiālo punktu inerces momentu summa:
Kā piemēru mēs iegūstam formulu plāna viendabīga stieņa inerces moments garums l un masa T attiecībā pret asi, kas ir perpendikulāra stienim un iet caur tā vidu (5.6. att.). Izvēlēsimies pietiekami mazu stieņa posmu ar garumu dx un masa dm, attālināts no ass 00" par attālumu X.Šī laukuma mazuma dēļ to var uztvert kā materiālu punktu, tā inerces momentu [sk. (5.15)] ir vienāds ar: Elementāra sekcijas masa ir vienāda ar lineārā blīvuma reizinājumu t/l, reizināts ar elementārās sadaļas garumu: dm= (m/l) dx Aizvietojot šo izteiksmi ar (5.18), iegūstam Lai atrastu visa stieņa inerces momentu, mēs integrējam izteiksmi (5.19) pa visu stieni, t.i. diapazonā no -1/2 līdz +1/2:
Iesniegsim izteiksmes dažādu simetrisku masas ķermeņu inerces momentiem T: dobs viendabīgs cilindrs(stīpa) ar iekšējo rādiusu r un ārējo R attiecībā pret asi OO", kas sakrīt ar cilindra ģeometrisko asi (5.7. att.): nepārtraukta viendabīga cilindrs (r = 0) vai disks [sk (5.21.)]: viendabīga bumba attiecībā pret asi, kas iet caur tās centru: taisnstūra paralēlskaldnis attiecībā pret asi OO", kas iet caur tās centru perpendikulāri pamatnes plaknei (5.8. att.): Visos iepriekš minētajos piemēros rotācijas ass iet caur ķermeņa masas centru. Risinot uzdevumus, lai noteiktu ķermeņa inerces momentu ap asi, kas neiet cauri masas centram, var izmantot Huygens teorēmu. Saskaņā ar šo teorēmu ķermeņa inerces moments attiecībā pret kādu asi OO": kur J 0 ir inerces moments ap paralēlu asi, kas iet caur ķermeņa masas centru OO"; T- ķermeņa svars; d- attālums starp divām paralēlām asīm (5.9. att.). Inerces momenta mērvienība ir kilograms metrs kvadrātā(kg-m2).
Impulss impulsa moments(leņķiskais impulss)Materiālu punktu, kas rotē ap noteiktu asi, sauc par vērtību, kas vienāda ar punkta impulsa reizinājumu tā attālumā no rotācijas ass: Ķermeņa leņķiskais impulss, kas rotē ap noteiktu asi, ir vienāds ar to punktu leņķiskā impulsa summu, kas veido ķermeni:
Tā kā stingra ķermeņa visu punktu leņķiskais ātrums ir vienāds, izņemot ω no summas zīmes [sk. (5.29)], mēs iegūstam: (/ - ķermeņa inerces moments attiecībā pret asi), vai vektora formā: Tātad leņķiskais impulss ir vienāds ar punkta inerces momenta un leņķiskā ātruma reizinājumu. No tā izriet, ka leņķiskā impulsa un leņķiskā ātruma vektoru virzieni sakrīt. Leņķiskā impulsa mērvienība ir kilogramu metrs kvadrātā sekundē(kg? m2? s -1). Ir lietderīgi salīdzināt formulu (5.31) ar līdzīgu impulsa formulu translācijas kustībā. Rotējoša ķermeņa kinētiskā enerģija Kad ķermenis griežas, tā kinētiskā enerģija sastāv no atsevišķu ķermeņa punktu kinētiskajām enerģijām. Par cietu: Ir lietderīgi salīdzināt izteiksmi (5.32) ar līdzīgu izteiksmi translācijas kustībai. Diferencējot (5.32), iegūstam elementāras kinētiskās enerģijas izmaiņas rotācijas kustībā: Rotācijas kustības dinamikas pamatvienādojums Ļaujiet cietajam ķermenim, uz kuru iedarbojās ārējie spēki, griezties ar pietiekami mazu leņķi da. Pielīdzināsim visu ārējo spēku elementāro darbu šādas rotācijas laikā [sk. (5.13)] uz elementārām kinētiskās enerģijas izmaiņām [sk. (5.33)]: M dα = Džω dω , no kurienes:
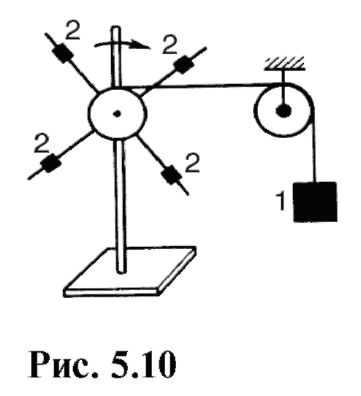
Šis ir tas pamatarotācijas kustības dinamikas vienādojums. No (5.35) ir skaidrs, ka inerces moments raksturo ķermeņa inerces īpašības rotācijas kustībā: ārējo spēku iedarbībā ķermeņa leņķiskais paātrinājums ir lielāks, jo mazāks ir ķermeņa inerces moments. Rotācijas kustības pamatvienādojumam ir tāda pati loma kā Ņūtona otrajam likumam translācijas kustībai. Šajā vienādojumā iekļautie fizikālie lielumi ir attiecīgi līdzīgi spēkam, masai un paātrinājumam. No (5.34) no tā izriet, ka: Ķermeņa leņķiskā impulsa atvasinājums attiecībā pret laiku ir vienāds ar visu ārējo spēku rezultējošo momentu. Leņķiskā paātrinājuma atkarību no spēka momenta un inerces momenta var pierādīt ar
ar ierīces jaudu, kas parādīta attēlā. 5.10. Zem slodzes 1, piekārts uz vītnes, kas izmests pāri blokam, krusts ātri griežas. Pārvietojami svari 2 dažādos attālumos no griešanās ass, jūs varat mainīt šķērsgriezuma inerces momentu. Mainot slodzes, t.i. spēku momentus un inerces momentu, var pārbaudīt, vai leņķiskais paātrinājums palielinās, palielinoties spēka momentam vai samazinoties inerces momentam. 5.3. MOMENTUMA SAGLABĀŠANAS LIKUMS Apskatīsim īpašo rotācijas kustības gadījumu, kad ārējo spēku kopējais moments ir nulle. Kā redzams no (5.37), dl/dt= 0 plkst M = 0, no kurienes Šis noteikums ir pazīstams kā leņķiskā impulsa saglabāšanas likums: ja visu ārējo spēku kopējais moments, kas iedarbojas uz ķermeni, ir vienāds ar nulli, tad šī ķermeņa leņķiskais impulss paliek nemainīgs. Izlaižot pierādījumu, mēs atzīmējam, ka leņķiskā impulsa saglabāšanas likums ir spēkā ne tikai absolūti stingram ķermenim. Interesantākie šī likuma pielietojumi ir saistīti ar ķermeņu sistēmas griešanos ap kopēju asi. Šajā gadījumā ir jāņem vērā leņķiskā impulsa un leņķisko ātrumu vektora raksturs. Tātad sistēmai, kas sastāv no Nķermeņi, kas rotē ap kopējo asi, leņķiskā impulsa saglabāšanas likumu var uzrakstīt šādā formā: Apskatīsim dažus piemērus, kas ilustrē šo likumu. Vingrotājs, veicot salto (5.11. att.), sākuma fāzē saliec ceļus un piespiež tos pie krūtīm, tādējādi samazinot inerces momentu un palielinot griešanās leņķisko ātrumu ap horizontālo asi, kas iet caur masas centru. Lēciena beigās ķermenis iztaisnojas, palielinās inerces moments un samazinās leņķiskais ātrums. Slidotājs, kurš rotācijas sākumā veic rotāciju ap vertikālo asi (5.12. att.), tuvina rokas ķermenim, tādējādi samazinot inerces momentu un palielinot leņķisko ātrumu. Rotācijas beigās notiek pretējs process: kustinot rokas, palielinās inerces moments un samazinās leņķiskais ātrums, kas ļauj viegli apstāties.
To pašu parādību var demonstrēt uz Žukovska sola, kas ir viegla horizontāla platforma, kas rotē ar zemu berzi ap vertikālo asi. Mainoties roku stāvoklim, mainās inerces moments un leņķiskais ātrums (5.13. att.), leņķiskais impulss paliek nemainīgs. Lai uzlabotu demonstrācijas efektu, cilvēka rokās ir hanteles. Uz Žukovska sola jūs varat demonstrēt leņķiskā impulsa saglabāšanas likuma vektora raksturu. Eksperimentētājs, stāvot uz stacionāra sola, no palīga saņem velosipēda riteni, kas griežas ap vertikālu asi (5.14. att., pa kreisi). Šajā gadījumā personas un platformas-riteņa sistēmas leņķisko impulsu nosaka tikai riteņa leņķiskais impulss: šeit J h ir personas un platformas inerces moments; J K un ω κ - riteņa inerces moments un leņķiskais ātrums. Tā kā ārējo spēku moments attiecībā pret vertikālo asi ir nulle, tad L ir saglabāts (L = const). Ja eksperimentētājs pagriež riteņa griešanās asi par 180° (5.14. att. pa labi), tad riteņa leņķiskais impulss būs vērsts pretējs oriģinālam un vienāds ar J K ω K. Tā kā riteņa leņķiskā impulsa vektors mainās un sistēmas leņķiskais impulss tiek saglabāts, cilvēka un platformas leņķiskais impulss vairs nebūs vienāds ar nulli 1 . Sistēmas leņķiskais impulss šajā gadījumā 1 Var neņemt vērā nelielu neatbilstību starp riteņa asi un platformas rotācijas asi.
Izmantojot formulu (5.42), iespējams aptuveni novērtēt cilvēka ķermeņa inerces momentu kopā ar platformu, kuram nepieciešams izmērīt ω κ, ω 4 un atrast J k. Lasītājam ir zināma metode vienmērīgas rotācijas leņķisko ātrumu mērīšanai. Zinot riteņa masu un pieņemot, ka masa galvenokārt ir sadalīta pa loku, izmantojot formulu (5.22), varam noteikt J k. Lai samazinātu kļūdu, velosipēda riteņa loku var padarīt smagāku, uzliekot tam speciālas riepas. Personai jābūt novietotai simetriski pret rotācijas asi. Vienkāršāka aplūkotā demonstrācijas versija ir tāda, ka cilvēks, kurš stāv uz Žukovska sola, pats griež riteni, kuru viņš tur uz vertikālas ass. Šajā gadījumā cilvēks un platforma sāk griezties pretējos virzienos (5.15. att.).
5.4. BRĪVĀS ROTĀCIJAS ACS JĒDZIENS Korpuss, kas rotē ap fiksētu asi, parasti iedarbojas uz gultņiem vai citām ierīcēm, kas šīs ass pozīciju uztur nemainīgu. Pie lieliem leņķiskajiem ātrumiem un inerces momentiem šīs sekas var būt nozīmīgas. Tomēr jebkurā korpusā ir iespējams izvēlēties asis, kuru virziens rotācijas laikā tiks saglabāts bez īpašām ierīcēm. Lai saprastu, kādiem nosacījumiem ir jāatbilst šādu asu izvēlei, apsveriet šādu piemēru. Salīdzinot (5.43) ar masas centra koordinātām, mēs novērojam, ka spēki, kas iedarbojas uz asi, ir līdzsvaroti, ja rotācijas ass iet caur masas centru. Patvaļīgas formas ķermenim vienmēr ir vismaz trīs savstarpēji perpendikulāras asis, kas iet caur masas centru, kas var būt brīvas griešanās asis. Šīs asis sauc par galvenajām inerces asīm. Lai gan visas trīs galvenās inerces asis ir brīvas, visstabilākā rotācija būs ap asi ar lielāko inerces momentu. Fakts ir tāds, ka ārējo spēku, piemēram, berzes, neizbēgamas darbības rezultātā, kā arī tāpēc, ka ir grūti precīzi iestatīt rotāciju ap noteiktu asi, rotācija ap atlikušajām brīvajām asīm ir nestabila. Dažos gadījumos, kad ķermenis griežas ap brīvu asi ar nelielu inerces momentu, tas pats maina šo asi uz asi ar lielāko momentu. Šo parādību parāda šāds eksperiments. No elektromotora ar vītni piekārts cilindrisks stienis, kas var griezties ap savu ģeometrisko asi (5.17. att., a). Inerces moments ap šo asi J1 = mR2/2. Pie pietiekami liela leņķiskā ātruma nūja mainīs savu pozīciju (5.17. att., b). Inerces moments attiecībā pret jauno asi ir vienāds ar J 2 = ml 2/12. Ja l 2 > 6R 2, tad J 2 > J 1. Rotācija ap jauno asi būs stabila. Lasītājs var neatkarīgi no pieredzes pārliecināties, ka izmestas sērkociņu kastītes rotācija ir stabila attiecībā pret asi, kas ir perpendikulāra lielākajai virsmai, un nestabila vai mazāk stabila attiecībā pret asīm, kas iet perpendikulāri citām skaldnēm (sk. 5.8. att.). Dzīvnieku un cilvēku rotācija brīvā lidojumā un dažādu lēcienu laikā notiek ap brīvām asīm ar lielāko vai mazāko inerces momentu. Tā kā masas centra novietojums ir atkarīgs no ķermeņa stājas, dažādām pozām būs dažādas brīvas asis.
5.5. BRĪVĪBAS PAKĀPJU JĒDZIENS Brīvā materiāla punkta atrašanās vietu telpā nosaka trīs neatkarīgas koordinātas: x, y, z. Ja punkts nav brīvs, bet pārvietojas, piemēram, pa kādu virsmu, tad visas trīs koordinātes nebūs neatkarīgas.
Neatkarīgus mainīgos, kas raksturo mehāniskās sistēmas stāvokli, sauc par brīvības pakāpēm. Brīvam materiālam punktam ir trīs brīvības pakāpes, aplūkotajā piemērā - divas brīvības pakāpes. Tā kā monatomiskas gāzes molekulu var uzskatīt par materiālu punktu, tad arī šādai brīvai molekulai ir trīs brīvības pakāpes. Vēl daži piemēri. Divi materiāli punkti 1 un 2 ir stingri savienoti viens ar otru. Abu punktu atrašanās vietu nosaka sešas koordinātas x 1, y 1, z 1, x 2, y 2, z 2, uz kuriem attiecas viens ierobežojums un viens savienojums, kas matemātiski izteikts vienādojuma veidā: Fiziski tas nozīmē, ka attālums starp materiālajiem punktiem vienmēr ir l.Šajā gadījumā brīvības pakāpju skaits ir 5. Aplūkotais piemērs ir divatomiskās molekulas modelis. Trīs materiāla punkti 1, 2 un 3 ir stingri savienoti viens ar otru. draugs. Deviņas koordinātas raksturo šādas sistēmas stāvokli: x 1 , y 1 , z 1, x 2 , y 2 , z2, x 3 y 3 , z 3 . Tomēr trīs savienojumi starp punktiem nosaka tikai sešu koordinātu neatkarību. Sistēmai ir sešas brīvības pakāpes. Tā kā trīs punktu stāvoklis, kas neatrodas uz vienas taisnas līnijas, unikāli nosaka stingra ķermeņa stāvokli, stingrajam ķermenim ir sešas brīvības pakāpes. Triatomu un poliatomu molekulām ir vienāds brīvības pakāpju skaits (sešas), ja šīs molekulas uzskata par stingriem veidojumiem. 1 Ja atkarīgajai koordinātei tiek iegūta iedomātā vērtība no (5.44), tas nozīmē, ka izvēlētās neatkarīgās koordinātas neatbilst nevienam punktam, kas atrodas uz dotā rādiusa sfēras. Reālās poliatomiskās molekulās atomi atrodas vibrācijas kustībā, tāpēc šādu molekulu brīvības pakāpju skaits ir lielāks par sešām. Brīvības pakāpju skaits nosaka ne tikai neatkarīgo mainīgo skaitu, kas raksturo mehāniskās sistēmas stāvokli, bet arī, kas ir ļoti svarīgi, sistēmas neatkarīgo kustību skaitu. Tādējādi trīs brīva materiāla punkta brīvības pakāpes nozīmē, ka jebkura punkta kustība var tikt sadalīta neatkarīgās kustībās pa trim koordinātu asīm. Tā kā punktam nav izmēru, nav jēgas runāt par tā rotāciju. Tātad materiālam punktam ir trīs translācijas kustības brīvības pakāpes. Materiālajam punktam uz plaknes, sfēras vai citas virsmas ir divas translācijas kustības brīvības pakāpes. Materiāla punkta kustība pa līkni (parasts piemērs ir vilciena kustība pa sliedēm) atbilst vienai translācijas kustības brīvības pakāpei. Stingram ķermenim, kas rotē ap fiksētu asi, ir viena rotācijas kustības brīvības pakāpe. Vilciena ritenim ir divas brīvības pakāpes: viena ir rotācijas kustība, bet otra ir translatīva (riteņa ass pārvietošana pa sliedēm). Sešas stingra ķermeņa brīvības pakāpes nozīmē, ka jebkura šī ķermeņa kustība var tikt sadalīta komponentos: masas centra kustība tiek sadalīta trīs translācijas kustībās pa koordinātu asīm, un rotācija sastāv no trim vienkāršākiem apgriezieniem ap koordinātu asīm. kas iet caur masas centru. Attēlā 5.18-5.20 parāda šarnīrveida locītavas, kas atbilst vienai, divām un trim brīvības pakāpēm.
Rīsi. 5.18
Rīsi. 5.19
Rīsi. 5.20 5.6. CENTRIFUGĀCIJA Centrifugēšana ir neviendabīgu sistēmu, piemēram, daļiņu atdalīšanas (atdalīšanas) process no šķidrumiem, kuros tās atrodas, to rotācijas dēļ. Apskatīsim nehomogēnu sistēmu atdalīšanu gravitācijas laukā. Pieņemsim, ka ir dažāda blīvuma daļiņu ūdens suspensija. Laika gaitā gravitācijas un peldošā spēka iedarbības dēļ F A notiek daļiņu atdalīšanās: daļiņas, kuru blīvums ir lielāks par ūdens iegrimšanas blīvumu, daļiņas, kuru blīvums ir mazāks nekā ūdens, peld. Rezultējošais spēks, kas iedarbojas, piemēram, uz blīvāku atsevišķu daļiņu, ir vienāds ar: Kur ρ 1 - daļiņu blīvums; ρ - ūdens blīvums; V- daļiņu tilpums. Ja ρ 1 un ρ vērtības maz atšķiras viena no otras, tad spēks Fp ir mazs un atdalīšanās (nogulsnēšanās) notiek diezgan lēni. Centrifūgā (separatorā) šādu atdalīšanu veic piespiedu kārtā, rotējot atdalīto vidi. Apskatīsim šīs parādības fiziku. Ļaujiet centrifūgas darba tilpumam (5.21. att.: a - izskats; b - darba tilpuma diagramma) pilnībā aizņemt kādu viendabīgu šķidrumu. Garīgi izvēlēsimies nelielu skaļumu V no šī šķidruma, kas atrodas attālumā r no rotācijas ass OO". Vienmērīgi griežoties centrifūgai, papildus gravitācijas un peldspējas spēkam, kas līdzsvaro viens otru, uz izvēlēto tilpumu iedarbojas centripetāls spēks. Tas ir spēks no šķidruma, kas ieskauj tilpumu. Tas ir dabiski vērsts pret rotācijas asi un ir vienāds ar: Kur ρ ir šķidruma blīvums. Tagad pieņemsim, ka piešķirtais apjoms V ir atdalīta daļiņa, kuras vielas blīvums ir ρ 1 (ρ 1 Φ ρ). Spēks, kas iedarbojas uz daļiņu no apkārtējā šķidruma, nemainīsies, kā redzams no formulas (5.45). Lai daļiņa grieztos kopā ar šķidrumu, uz to jāiedarbojas ar centripetālu spēku, kas vienāds ar: Kur m 1 ir daļiņas masa, un ρ 1 ir atbilstošais blīvums.
Rīsi. 5.21 Ja F> F 1, tad daļiņa virzās uz rotācijas asi. Ja F< F 1, tad ar triecienu uz daļiņu no šķidruma nepietiks, lai tā noturētos pa apļveida trajektoriju, un daļiņa ar inerci sāks virzīties uz perifēriju. Atdalīšanas efektu nosaka pārmērīgais spēks F, iedarbojoties no šķidruma puses uz izvēlēto daļiņu virs centripetālā spēka F 1 vērtības, kas nosaka apļveida kustību: Šī izteiksme parāda, ka centrifugēšanas efekts ir lielāks, jo lielāka ir atdalīto daļiņu un šķidruma blīvuma atšķirība, kā arī būtiski atkarīga no griešanās leņķiskā ātruma 1. Salīdzināsim atdalīšanu ar centrifugēšanu ar atdalīšanu, izmantojot gravitāciju:
1 Atvasinot formulu (5.47), gravitācija un peldošais spēks netiek ņemts vērā, jo tie ir vērsti pa rotācijas asi un tiem nav būtiskas ietekmes uz centrifugēšanu. Ultracentrifūgas spēj atdalīt daļiņas, kas ir mazākas par 100 nm, suspendētas vai izšķīdinātas šķidrumā. Viņi ir atraduši plašu pielietojumu biomedicīnas pētījumos biopolimēru, vīrusu un subcelulāro daļiņu atdalīšanai. Separācijas ātrums ir īpaši svarīgs bioloģiskajos un biofizikālajos pētījumos, jo laika gaitā pētāmo objektu stāvoklis var būtiski mainīties. Pamatjēdzieni. spēka moments attiecībā pret rotācijas asi - tas ir rādiusa vektora un spēka vektora reizinājums.
Spēka moments ir vektors , kura virzienu nosaka karkasa (labās skrūves) noteikums atkarībā no spēka virziena, kas iedarbojas uz ķermeni. Spēka moments ir vērsts pa griešanās asi un tam nav noteikta pielietojuma punkta. Šī vektora skaitlisko vērtību nosaka pēc formulas: M=r F grēks (1.15), kur - leņķis starp rādiusa vektoru un spēka virzienu. Ja =0 vai , spēka moments M=0, t.i. spēks, kas iet cauri rotācijas asi vai sakrīt ar to, neizraisa rotāciju. Lielākais moduļa griezes moments rodas, ja spēks darbojas leņķī = /2 (M 0) vai =3 /2 (M 0). Izmantojot sviras jēdzienu d- tas ir perpendikuls, kas nolaists no rotācijas centra uz spēka darbības līniju), spēka momenta formula ir šāda:
Spēku momentu likums(līdzsvara nosacījums ķermenim ar fiksētu rotācijas asi): Lai ķermenis ar fiksētu rotācijas asi atrastos līdzsvarā, ir nepieciešams, lai uz šo ķermeni iedarbojošo spēku momentu algebriskā summa būtu vienāda ar nulli. M i =0 (1.17) Spēka momenta SI mērvienība ir [Nm] Rotācijas kustības laikā ķermeņa inerce ir atkarīga ne tikai no tā masas, bet arī no tā sadalījuma telpā attiecībā pret rotācijas asi. Inerci rotācijas laikā raksturo ķermeņa inerces moments attiecībā pret rotācijas asi Dž. Inerces moments materiāla punkta vērtība attiecībā pret griešanās asi ir vērtība, kas vienāda ar punkta masas reizinājumu ar tā attāluma no rotācijas ass kvadrātu: Dž =m r 2 (1.18) Ķermeņa inerces moments attiecībā pret asi ir to materiālo punktu inerces momentu summa, kas veido ķermeni: J= m r 2 (1.19) Ķermeņa inerces moments ir atkarīgs no tā masas un formas, kā arī no rotācijas ass izvēles. Lai noteiktu ķermeņa inerces momentu attiecībā pret noteiktu asi, tiek izmantota Šteinera-Haigensa teorēma: J=J 0 +m d 2 (1.20), Kur Dž 0 – inerces moments ap paralēlu asi, kas iet caur ķermeņa masas centru, d – attālums starp divām paralēlām asīm . Inerces momentu SI mēra [kgm 2 ] Inerces momentu cilvēka ķermeņa rotācijas kustības laikā nosaka eksperimentāli un aptuveni aprēķina, izmantojot cilindra, apaļā stieņa vai lodītes formulas. Cilvēka inerces moments attiecībā pret vertikālo rotācijas asi, kas iet caur masas centru (cilvēka ķermeņa masas centrs atrodas sagitālajā plaknē nedaudz priekšā otrajam sakrālajam skriemelim), atkarībā no personas pozīcija, ir šādas vērtības: stāvot uzmanībā - 1,2 kg m 2; ar “arabeskas” pozu – 8 kgm 2; horizontālā stāvoklī – 17 kg m 2. Darbs rotācijas kustībā rodas, kad ķermenis griežas ārējo spēku ietekmē. Spēka elementārais darbs rotācijas kustībā ir vienāds ar spēka momenta un ķermeņa elementārā griešanās leņķa reizinājumu: dA =M d (1.21) Ja uz ķermeni iedarbojas vairāki spēki, tad visu pielietoto spēku rezultanta elementāro darbu nosaka pēc formulas: dA=M d (1.22), Kur M– visu uz ķermeni iedarbojošo ārējo spēku kopējais moments. Rotējoša ķermeņa kinētiskā enerģijaW Uz ir atkarīgs no ķermeņa inerces momenta un tā griešanās leņķiskā ātruma:
Leņķiskais impulss (leņķiskais impulss) L=p r=m V r (1.24). Pēc atbilstošām transformācijām leņķiskā momenta noteikšanas formulu varat uzrakstīt formā:
Impulss Rotācijas kustības dinamikas pamatlikumi. Rotācijas kustības dinamikas pamatvienādojums: Rotācijas kustībā esoša ķermeņa leņķiskais paātrinājums ir tieši proporcionāls visu ārējo spēku kopējam momentam un apgriezti proporcionāls ķermeņa inerces momentam.
Šim vienādojumam ir tāda pati loma, aprakstot rotācijas kustību, kā Ņūtona otrajam likumam translācijas kustībai. No vienādojuma ir skaidrs, ka ārējo spēku iedarbībā, jo lielāks ir leņķiskais paātrinājums, jo mazāks ir ķermeņa inerces moments. Otro Ņūtona likumu rotācijas kustības dinamikai var uzrakstīt citā formā:
tie. pirmais ķermeņa leņķiskā impulsa atvasinājums attiecībā pret laiku ir vienāds ar kopējo momentu visiem ārējiem spēkiem, kas iedarbojas uz doto ķermeni. Ķermeņa leņķiskā impulsa saglabāšanas likums: Ja visu uz ķermeni iedarbojošo ārējo spēku kopējais moments ir vienāds ar nulli, t.i. M =0 , Tad dL/dt=0 (1.28). No tā izriet Šis apgalvojums veido ķermeņa leņķiskā impulsa saglabāšanas likuma būtību, kas formulēts šādi: Ķermeņa leņķiskais impulss paliek nemainīgs, ja ārējo spēku kopējais moments, kas iedarbojas uz rotējošu ķermeni, ir nulle. Šis likums ir spēkā ne tikai absolūti stingram ķermenim. Piemērs ir daiļslidotājs, kurš veic rotāciju ap vertikālo asi. Nospiežot rokas, slidotājs samazina inerces momentu un palielina leņķisko ātrumu. Lai palēninātu rotāciju, viņš, gluži pretēji, plaši izpleš rokas; Tā rezultātā palielinās inerces moments un samazinās griešanās leņķiskais ātrums. Noslēgumā mēs sniedzam salīdzinošu tabulu ar galvenajiem daudzumiem un likumiem, kas raksturo translācijas un rotācijas kustību dinamiku. 1.4. tabula.
=konst.,
Tāpēc no ārējā spēka, kas tiek pielikts ķermenim, ir nepieciešams izolēt sastāvdaļas, kas neizraisa rotāciju. Rotāciju var izraisīt tikai spēks (rotācijas spēks), kas atrodas plaknē, kas ir perpendikulāra rotācijas asij un ir vērsta tangenciāli uz apli, ko apraksta tā pielietošanas punkts. Ņemiet vērā, ka, korpusam griežoties, sastāvdaļas neveic darbu, jo šo spēku pielikšanas punkts pārvietojas perpendikulāri to virzieniem. Darbs tiek veikts tikai ar rotācijas spēku, tas ir uz ķermeni iedarbojošā spēka projekcija uz šī spēka pielikšanas punkta kustības virzienu. Noteiksim rotējošā spēka veiktā darba apjomu, ja tā pielietošanas punkts pārvietojas pa rādiusa apli par (1.19. att., b). Pieņemsim, ka spēka lielums paliek nemainīgs. Tad Rotācijas spēka un rādiusa reizinājums ir griešanās spēka moments jeb griezes moments, kas iedarbojas uz noteiktu ķermeni, un to apzīmē ar (atgādiniet, ka dotā spēka moments attiecībā pret jebkuru asi ir šī spēka reizinājums ar tā plecs, t.i., pēc perpendikula garuma, kas veikta no norādītā asi pret spēka virzienu). Tādējādi formulā (2.8) tāpēc griezes momenta veiktais darbs ir vienāds ar šī momenta un korpusa griešanās leņķa reizinājumu:
Ja griezes moments (spēks vai tā plecs) laika gaitā mainās, tad paveikto darbu nosaka kā summu:
Rotācijas spēka griezes moments ir attēlots kā vektors, kas sakrīt ar rotācijas asi; šī vektora pozitīvā orientācija ir izvēlēta virzienā, kurā kustētos ar šo momentu pagrieztā labā skrūve. Korpusam pielietotais griezes moments piešķir tam zināmu leņķisko paātrinājumu atbilstoši mūsu izvēlēto vektoru virzieniem, tie ir orientēti pa rotācijas asi vienā virzienā. Sakarību starp griezes momenta lielumu un tā radītā leņķiskā paātrinājuma lielumu var noteikt divos veidos: a) var izmantot faktu, ka virzošā spēka darbs ir vienāds ar ķermeņa kinētiskās enerģijas izmaiņām, uz kuru šis spēks tiek pielietots: Rotējošam ķermenim saskaņā ar (2.9) un (2.4) formulām mēs ir
Šeit mēs pieņemam, ka ķermeņa inerces moments rotācijas laikā nemainās. Sadalot šo vienādojumu ar un samazinot ar, mēs iegūstam
b) var izmantot to, ka rotācijas spēka moments ir vienāds ar to spēku momentu summu, kas piešķir tangenciālus paātrinājumus atsevišķām ķermeņa sastāvdaļām, un to momenti ir vienādi Aizstāsim tangenciālos paātrinājumus ar leņķisko paātrinājumu, kas ir vienāds visām rotējošā ķermeņa daļiņām (ja ķermenis rotācijas laikā nedeformējas): Tad Formula (2.12) izsaka cietu (nedeformējamu) ķermeņu rotācijas kustības dinamikas pamatlikumu, kuram leņķiskais paātrinājums, ko ķermenis iegūst noteiktā griezes momenta ietekmē, ir tieši proporcionāls šī momenta lielumam un apgriezti proporcionāls ķermeņa inerces momentam attiecībā pret griešanās asi:
Vektora formā šis likums ir uzrakstīts kā Ja ķermenis rotācijas laikā tiek deformēts, mainīsies tā inerces moments attiecībā pret griešanās asi. Iedomāsimies garīgi rotējošu ķermeni, kas sastāv no daudzām elementārām (punktveida) daļām; tad visa ķermeņa deformācija nozīmēs izmaiņas attālumos no šīm ķermeņa daļām līdz rotācijas asij. Tomēr, mainoties attālumam līdz noteiktam griešanās leņķiskajam ātrumam, mainīsies šīs daļiņas lineārais kustības ātrums un līdz ar to arī tās kinētiskā enerģija. Tādējādi pie nemainīga ķermeņa griešanās leņķiskā ātruma attālumu izmaiņas (tātad ķermeņa inerces momenta izmaiņas) pavadīs visa ķermeņa rotācijas kinētiskās enerģijas izmaiņas. No formulas (2.4), pieņemot mainīgos, mēs varam iegūt Pirmais termins parāda rotējoša ķermeņa kinētiskās enerģijas izmaiņas, kas notika tikai rotācijas leņķiskā ātruma izmaiņu dēļ (noteiktā ķermeņa inerces momentā), bet otrais termins parāda kinētiskās enerģijas izmaiņas. , kas radās tikai ķermeņa inerces momenta izmaiņu dēļ (pie dotā griešanās leņķiskā ātruma). Tomēr, mainoties attālumam no punkta ķermeņa līdz rotācijas asij, darbosies iekšējie spēki, kas savieno šo ķermeni ar rotācijas asi: negatīvi, ja ķermenis attālinās, un pozitīvi, ja ķermenis tuvojas rotācijas asij; šo darbu var aprēķināt, ja pieņemam, ka spēks, kas savieno daļiņu ar rotācijas asi, ir skaitliski vienāds ar centripetālo spēku: Par visu ķermeni, kas sastāv no daudzām daļiņām ar masām, mēs iegūstam Vispārīgā gadījumā, kad ārējais griezes moments iedarbojas uz ķermeni, kinētiskās enerģijas izmaiņas ir jāpielīdzina divu darbu summai: ārējais griezes moments un iekšējie spēki Ar paātrinātu rotāciju vērtībām būs pozitīvas zīmes - negatīvas zīme (jo ķermeņa daļiņas attālinās no rotācijas ass); Tad
Aizvietojot šeit vērtību no izteiksmes (2.15) un aizstājot ar, mēs iegūstam vai pēc samazināšanas Šī ir vispārīga mehānikas pamatlikuma forma ķermeņiem, kas rotē ap fiksētu asi, tas ir piemērojams arī ķermeņu deformēšanai. Kad formula (2.16) pārvēršas formulā (2.14). Ņemiet vērā, ka deformējošiem ķermeņiem rotācijas leņķiskā ātruma izmaiņas ir iespējamas pat tad, ja nav ārēja griezes momenta. Patiešām, kad no formulas (2.16) iegūstam: Šajā gadījumā rotācijas leņķiskais ātrums mainās tikai ķermeņa inerces momenta izmaiņu dēļ, ko izraisa iekšējie spēki. |
||||||||||||||||||||||||||||||||||||
 Rotācijas kustībā spēka lomu spēlē moments
Rotācijas kustībā spēka lomu spēlē moments  spēki, masas loma - inerces moments es z un impulsa loma - leņķiskais impulss
spēki, masas loma - inerces moments es z un impulsa loma - leņķiskais impulss  Zinot translācijas kustības formulas, ir viegli pierakstīt rotācijas kustības formulas. Piemēram, ar vienmērīgu kustību nobraukto attālumu aprēķina pēc formulas: s =
t, un ar rotācijas griešanās leņķi - pēc formulas = t. Ņūtona otrais likums
Zinot translācijas kustības formulas, ir viegli pierakstīt rotācijas kustības formulas. Piemēram, ar vienmērīgu kustību nobraukto attālumu aprēķina pēc formulas: s =
t, un ar rotācijas griešanās leņķi - pēc formulas = t. Ņūtona otrais likums  Un
Un  un rotācijas kustības dinamikas pamatlikums ir
un rotācijas kustības dinamikas pamatlikums ir  Un
Un  Translācijas kustības laikā ķermeņa impulss ir vienāds ar
Translācijas kustības laikā ķermeņa impulss ir vienāds ar  un rotācijas kustības laikā leņķiskais impulss ir
un rotācijas kustības laikā leņķiskais impulss ir  Šo analoģiju var turpināt.
Šo analoģiju var turpināt. , veidojot nemainīgu leņķi ar kustības virzienu, kustas taisni kādā atskaites sistēmā un šķērso ceļu l. Tad, kā zināms no skolas fizikas kursa, darbs Ašo spēku nosaka pēc formulas:
, veidojot nemainīgu leņķi ar kustības virzienu, kustas taisni kādā atskaites sistēmā un šķērso ceļu l. Tad, kā zināms no skolas fizikas kursa, darbs Ašo spēku nosaka pēc formulas: un leņķis ir nemainīgas vērtības, un pati sekcija ir taisna. Tad strādājiet dAšajā sadaļā mēs atrodam, izmantojot formulu (1): dA
=
F·
dl·
cos. Darbs A pa visu ceļu ir vienāds ar darba summu dA, t.i.
un leņķis ir nemainīgas vērtības, un pati sekcija ir taisna. Tad strādājiet dAšajā sadaļā mēs atrodam, izmantojot formulu (1): dA
=
F·
dl·
cos. Darbs A pa visu ceļu ir vienāds ar darba summu dA, t.i. (2)
(2) Kur
Kur  ir elementārās nobīdes vektors, un
ir elementārās nobīdes vektors, un (3)
(3) (4)
(4) griežas ap asi z kādā leņķī. Šis spēks rada griezes momentu M z, pagriežot korpusu. Spēks ir vērsts tangenciāli uz apli, pa kuru virzās spēka pielikšanas punkts. Tāpēc leņķis = 0. Ņemot to vērā, pēc analoģijas ar mehāniskā darba formulu (sk. (2)), mēs atrodam izteiksmi, pēc kuras tiek aprēķināts darbs rotācijas kustības laikā:
griežas ap asi z kādā leņķī. Šis spēks rada griezes momentu M z, pagriežot korpusu. Spēks ir vērsts tangenciāli uz apli, pa kuru virzās spēka pielikšanas punkts. Tāpēc leņķis = 0. Ņemot to vērā, pēc analoģijas ar mehāniskā darba formulu (sk. (2)), mēs atrodam izteiksmi, pēc kuras tiek aprēķināts darbs rotācijas kustības laikā: (5)
(5) ir atkarīgs tikai no materiālā punkta masas un tā stāvokļa attiecībā pret griešanās asi un nav atkarīgs no pašas rotācijas esamības.
ir atkarīgs tikai no materiālā punkta masas un tā stāvokļa attiecībā pret griešanās asi un nav atkarīgs no pašas rotācijas esamības. .
. ,
, ,
,
 - ķermeņa blīvums,
- ķermeņa blīvums,  - attālums no elementa
- attālums no elementa  uz rotācijas asi.
uz rotācijas asi.

 .
. Ja ķermenim ir zināms inerces moments ap asi, kas iet caur masas centru, tad inerces momentu ap jebkuru asi, kas ir paralēla pirmajai asij nosaka saskaņā ar Šteinera teorēma: ķermeņa inerces moments attiecībā pret patvaļīgu asi ir vienāds ar inerces momentu J 0 attiecībā pret asi, kas ir paralēla dotajai un iet caur ķermeņa masas centru, pieskaitot ķermeņa masas reizinājumam un attāluma starp asīm kvadrātā.
Ja ķermenim ir zināms inerces moments ap asi, kas iet caur masas centru, tad inerces momentu ap jebkuru asi, kas ir paralēla pirmajai asij nosaka saskaņā ar Šteinera teorēma: ķermeņa inerces moments attiecībā pret patvaļīgu asi ir vienāds ar inerces momentu J 0 attiecībā pret asi, kas ir paralēla dotajai un iet caur ķermeņa masas centru, pieskaitot ķermeņa masas reizinājumam un attāluma starp asīm kvadrātā.






















 (1.14)
(1.14) , Kur
, Kur  (1.16)
(1.16) (1.23)
(1.23) –
lielums, kas skaitliski vienāds ar ķermeņa impulsa un griešanās rādiusa reizinājumu.
–
lielums, kas skaitliski vienāds ar ķermeņa impulsa un griešanās rādiusa reizinājumu. (1.25).
(1.25). – vektors, kura virzienu nosaka labās skrūves likums. Leņķiskā momenta SI mērvienība irkgm 2 /s
– vektors, kura virzienu nosaka labās skrūves likums. Leņķiskā momenta SI mērvienība irkgm 2 /s (1.26).
(1.26). (1.27),
(1.27), vai
vai  (1.29).
(1.29).





 ,
,
 Ķermeņa impulsa saglabāšanas likums
Ķermeņa impulsa saglabāšanas likums vai
vai

 Ķermeņa impulsa saglabāšanas likums
Dž
Ķermeņa leņķiskā impulsa saglabāšanas likums
Ķermeņa impulsa saglabāšanas likums
Dž
Ķermeņa leņķiskā impulsa saglabāšanas likums


| Lasīt: |
|---|
Populāri:
Mikroelementi ietver
|
Jauns
- Solu attīrīšanas metodes: dialīze, elektrodialīze, ultrafiltrācija
- “Tīrā māksla”: F.I. Tjutčevs. “Tīrās mākslas” dzeja: tradīcijas un inovācijas Tīrās mākslas pārstāvji krievu literatūrā
- Kā pagatavot liellopa mēli mājās
- Receptes dzērveņu pagatavošanai mājās Dzērveņu ēdienu receptes cepšana
- Cepeškrāsnī cepts lasis
- Poliūrija Šo pētījumu mērķis ir identificēt
- Galvaspilsētas skolas ir gatavas jaunajam mācību gadam
- Kāpēc sapnī redzēt peles?
- Sapņo staigāt pa jūru. Kāpēc tu sapņo par jūru? Sapņa interpretācija par peldēšanu jūrā. Nelīdzena jūra sapnī
- Peoniju krūms Kāpēc jūs sapņojat par ziedošām peonijām?




