Saidi jaotised
Toimetaja valik:
- Kuus näidet pädevast lähenemisest arvude käändele
- Talvise poeetilise tsitaadi nägu lastele
- Vene keele tund "pehme märk pärast susisevaid nimisõnu"
- Helde puu (mõistujutt) Kuidas jõuda õnneliku lõpuni muinasjutule „Helde puu”
- Tunniplaan meid ümbritsevast maailmast teemal “Millal tuleb suvi?
- Ida-Aasia: riigid, rahvastik, keel, religioon, ajalugu Olles vastane pseudoteaduslikele teooriatele inimrasside jagamise kohta madalamateks ja kõrgemateks, tõestas ta tõde
- Ajateenistuseks sobivuse kategooriate klassifikatsioon
- Pahatihti ja armee Pahatihti armeesse ei võeta
- Miks unistate elusast surnud emast: unenägude raamatute tõlgendused
- Milliste sodiaagimärkide all on aprillis sündinud?
Reklaam
| Analoogandurid: rakendus, kontrolleriga ühendamise meetodid. Vooluväljundiga andurite ühendamine sekundaarseadmetega Süsteem koosneb |
|
Diskreetsed andurid See algoritm võimaldab vältida vormi sulgemisel lööke, vastasel juhul saab selle lihtsalt väikesteks tükkideks purustada. Samasugune kiiruse muutus toimub ka vormi avamisel. Siin ei piisa enam kahest kontaktandurist. Analoogandurite rakendamine Joonis 2. Wheatstone'i sild Analoogandurite ühendamine
Analooganduri väljundid
Kuid reeglina ühest andurist ei piisa. Mõned kõige populaarsemad mõõtmised on temperatuuri ja rõhu mõõtmine. Selliste punktide arv per kaasaegne tootmine võib ulatuda mitmekümne tuhandeni. Sellest lähtuvalt on ka andurite arv suur. Seetõttu on ühe kontrolleriga kõige sagedamini ühendatud korraga mitu analoogandurit. Muidugi mitte mitu tuhat korraga, on hea, kui kümmekond on erinevad. Selline ühendus on näidatud joonisel 7.
Joonis 7. Mitme analooganduri ühendamine kontrolleriga See joonis näitab, kuidas saadakse voolusignaalist digitaalseks koodiks teisendamiseks sobiv pinge. Kui selliseid signaale on mitu, siis neid kõiki korraga ei töödelda, vaid on ajaliselt eraldatud ja multipleksitud, muidu tuleks igale kanalile eraldi ADC paigaldada. Selleks on kontrolleril vooluahela lülitusahel. Funktsionaalne diagramm lüliti on näidatud joonisel 8.
Joonis 8. Analooganduri kanali lüliti (pilt klõpsatav) Mõõtetakisti (UR1...URn) pingeks muudetud vooluahela signaalid suunatakse analooglüliti sisendisse. Juhtsignaalid lähevad vaheldumisi väljundisse üks võimendi poolt võimendatud signaalidest UR1...URn ja vaheldumisi saabuvad ADC sisendisse. Digitaalseks koodiks teisendatud pinge antakse kontrollerile. Skeem on muidugi väga lihtsustatud, kuid selles on täiesti võimalik arvestada multipleksimise põhimõttega. Umbes nii on ehitatud MSTS-kontrollerite (mikroprotsessorisüsteem) analoogsignaalide sisestamise moodul tehnilisi vahendeid) toodetud Smolenski PC "Prolog" poolt. Selliste kontrollerite tootmine on juba ammu lõpetatud, kuigi mõnes kohas, kaugel parimast, need kontrollerid endiselt teenivad. Neid muuseumieksponaate asendavad uute, enamasti imporditud (Hiina) mudelite kontrollerid. Kui kontroller on paigaldatud metallkappi, on soovitatav ühendada varjestuspunutised kapi maanduspunktiga. Pikkus ühendusliinid võib ulatuda üle kahe kilomeetri, mis arvutatakse vastavate valemite abil. Me ei loe siin midagi, kuid uskuge mind, see on tõsi. Uued andurid, uued kontrollerid Uute kontrollerite tulekuga ilmusid ka uued analoogandurid, mis töötavad HART-protokolli (Highway Addressable Remote Transducer) abil, mis tõlkes tähendab "Kaugtee kaudu adresseeritud mõõtemuundurit". Anduri (väliseadme) väljundsignaal on analoogvoolusignaal vahemikus 4...20 mA, millele on peale kantud sagedusmoduleeritud (FSK - Frequency Shift Keying) digitaalne sidesignaal. Teadaolevalt on siinussignaali keskmine väärtus null, seetõttu ei mõjuta digitaalse info edastamine 4...20 mA anduri väljundvoolu. Seda režiimi kasutatakse andurite konfigureerimisel. HART-i suhtlust teostatakse kahel viisil. Esimesel, standardsel juhul saavad kahejuhtmelise liini kaudu infot vahetada ainult kaks seadet, väljundsignaal aga 4...20 mA sõltub mõõdetud väärtusest. Seda režiimi kasutatakse väliseadmete (andurite) konfigureerimisel. Teisel juhul saab kahejuhtmelise liini külge ühendada kuni 15 andurit, mille arv määratakse sideliini parameetrite ja toiteallika võimsusega. See on mitmepunktirežiim. Selles režiimis on igal anduril oma aadress vahemikus 1...15, mille kaudu juhtseade sellele ligi pääseb. Andur aadressiga 0 on sideliinist lahti ühendatud. Andmevahetus anduri ja juhtseadme vahel mitmepunktirežiimis toimub ainult sagedussignaali abil. Anduri voolusignaal on fikseeritud vajalikul tasemel ja ei muutu. Mitmepunktilise side puhul ei tähenda andmed mitte ainult jälgitava parameetri tegelikke mõõtmistulemusi, vaid ka tervet kogumit kõikvõimalikku teenindusinfot. Esiteks on need andurite aadressid, juhtkäsud ja konfiguratsiooniparameetrid. Ja kogu see teave edastatakse kahejuhtmeliste sideliinide kaudu. Kas neist on võimalik ka lahti saada? Tõsi, seda tuleb teha ettevaatlikult, ainult juhtudel, kui traadita ühendus ei saa mõjutada kontrollitava protsessi ohutust. Need tehnoloogiad on asendanud vana analoogvooluahela. Kuid see ei loobu ka oma positsioonist, seda kasutatakse kõikjal, kus see on võimalik. Automatiseerimise protsessis tehnoloogilised protsessid Mehhanismide ja üksuste juhtimiseks tuleb tegeleda erinevate füüsikaliste suuruste mõõtmisega. See võib olla temperatuur, rõhk ja vedeliku või gaasi vool, pöörlemiskiirus, valguse intensiivsus, teave mehhanismide osade asukoha kohta ja palju muud. See teave saadakse andurite abil. Siin kõigepealt mehhanismide osade asukohast. Diskreetsed andurid Lihtsaim andur on tavaline mehaaniline kontakt: uks avatakse - kontakt avaneb, suletakse - sulgub. Sellist lihtsat andurit ja ka etteantud tööalgoritmi kasutatakse sageli valvesignalisatsioonid. Translatsioonilise liikumisega mehhanismi jaoks, millel on kaks asendit, näiteks veeklapp, vajate kahte kontakti: üks kontakt on suletud - klapp on suletud, teine on suletud - see on suletud. Keerulisemal translatsiooniliikumise algoritmil on mehhanism automaatse masina termoplastilise vormi sulgemiseks. Esialgu on vorm avatud, see on lähteasend. Selles asendis eemaldatakse need vormist valmistooted. Järgmiseks sulgeb töötaja kaitsekatte ja vorm hakkab sulguma ning algab uus töötsükkel. Vormi poolte vaheline kaugus on üsna suur. Seetõttu liigub vorm algul kiiresti ja teatud vahemaa tagant enne poolte sulgumist rakendub piirlüliti, liikumiskiirus väheneb oluliselt ja vorm sulgub sujuvalt. Seega on kontaktipõhised andurid diskreetsed või binaarsed, neil on kaks asendit, suletud - avatud või 1 ja 0. Teisisõnu võime öelda, et sündmus on toimunud või mitte. Ülaltoodud näites "püüavad" kontaktid mitu punkti: liikumise algus, kiiruse vähendamise punkt, liikumise lõpp. Geomeetrias pole punktil mõõtmeid, lihtsalt punkt ja kõik. See võib kas olla (paberil, liikumistrajektooril, nagu meie puhul) või seda lihtsalt ei eksisteeri. Seetõttu kasutatakse punktide tuvastamiseks diskreetseid andureid. Võib-olla pole siinkohal võrdlus punktiga väga kohane, sest praktilistel eesmärkidel kasutavad nad diskreetse anduri vastuse täpsust ja see täpsus on palju suurem kui geomeetriline punkt. Kuid mehaaniline kontakt ise on ebausaldusväärne. Seetõttu asendatakse mehaanilised kontaktid võimaluse korral kontaktivabade anduritega. Lihtsaim variant on pilliroo lülitid: magnet läheneb, kontakt sulgub. Pilliroo lüliti täpsus jätab soovida selliseid andureid kasutada vaid uste asukoha määramiseks. Erinevaid kontaktivabasid andureid tuleks pidada keerukamaks ja täpsemaks võimaluseks. Kui metalllipp sisenes pessa, siis andur käivitus. Selliste andurite näide on erinevate seeriate BVK (Proximity Limit Switch) andurid. Selliste andurite reageerimise täpsus (sõidudiferentsiaal) on 3 millimeetrit. BVK seeria andur Joonis 1. BVK seeria andur BVK andurite toitepinge on 24V, koormusvool 200mA, mis on täiesti piisav vahereleede ühendamiseks edasiseks koordineerimiseks juhtahelaga. Täpselt nii kasutatakse BVK andureid erinevates seadmetes. Lisaks BVK anduritele kasutatakse ka tüüpi BTP, KVP, PIP, KVD, PISH andureid. Igal seerial on mitut tüüpi andureid, mis on tähistatud numbritega, näiteks BTP-101, BTP-102, BTP-103, BTP-211. Kõik nimetatud andurid on mittekontaktsed diskreetsed, nende põhieesmärk on määrata mehhanismide ja sõlmede osade asukoht. Loomulikult on neid andureid palju rohkem, neist kõigist ühes artiklis kirjutada on võimatu. Veelgi levinum ja endiselt leitud lai rakendus erinevad kontaktandurid. Analoogandurite rakendamine Lisaks diskreetsetele anduritele kasutatakse automaatikasüsteemides laialdaselt analoogandureid. Nende eesmärk on saada teavet erinevate füüsikaliste suuruste kohta ja mitte ainult üldiselt, vaid reaalajas. Täpsemalt ümberkujundamine füüsiline kogus(rõhk, temperatuur, valgustus, vool, pinge, vool) elektrisignaaliks, mis sobib sideliinide kaudu kontrollerile edastamiseks ja selle edasiseks töötlemiseks. Analoogandurid asuvad tavaliselt kontrollerist üsna kaugel, mistõttu nimetatakse neid sageli väliseadmeteks. Seda terminit kasutatakse sageli tehnilises kirjanduses. Analoogandur koosneb tavaliselt mitmest osast. Kõige rohkem põhiosa See on tundlik element - andur. Selle eesmärk on teisendada mõõdetud väärtus elektrisignaaliks. Kuid andurilt saadud signaal on tavaliselt väike. Võimendiks sobiva signaali saamiseks kaasatakse andur kõige sagedamini sillaahelasse - Wheatstone'i silda. Wheatstone'i sild Joonis 2. Wheatstone'i sild Sillaahela algne eesmärk on takistuse täpne mõõtmine. Allikas on ühendatud AD silla diagonaaliga DC. Tundlik galvanomeeter, mille keskpunkt on null skaala keskel, on ühendatud teise diagonaaliga. Takisti Rx takistuse mõõtmiseks peaksite häälestustakisti R2 pööramisega saavutama silla tasakaalu ja seadma galvanomeetri nõela nulli. Instrumendi noole kõrvalekalle ühes või teises suunas võimaldab teil määrata takisti R2 pöörlemissuuna. Mõõdetud takistuse väärtus määratakse takisti R2 käepidemega kombineeritud skaalaga. Silla tasakaalutingimuseks on suhete R1/R2 ja Rx/R3 võrdsus. Sel juhul saadakse punktide BC vahel nullpotentsiaalide erinevus ja galvanomeetrit V ei voola vool. Takistite R1 ja R3 takistus on valitud väga täpselt, nende levik peaks olema minimaalne. Ainult sel juhul põhjustab isegi väike silla tasakaalustamatus diagonaali BC pinges üsna märgatava muutuse. Just seda silla omadust kasutatakse erinevate analoogandurite tundlike elementide (andurite) ühendamiseks. No siis on kõik lihtne, tehnika küsimus. Andurilt saadud signaali kasutamiseks on vaja edasist töötlemist – võimendamist ja muundamist väljundsignaaliks, mis sobib edastamiseks ja töötlemiseks juhtahela – kontrolleri – poolt. Kõige sagedamini on analoogandurite väljundsignaaliks vool (analoogvooluahel), harvem pinge. Miks praegune? Fakt on see, et analoogandurite väljundastmed on ehitatud vooluallikate baasil. See võimaldab vabaneda ühendusliinide takistuse mõjust väljundsignaalile ja kasutada pikki ühendusliine. Edasine teisendamine on üsna lihtne. Voolusignaal muundatakse pingeks, mille jaoks piisab voolu juhtimisest läbi teadaoleva takistusega takisti. Pingelangus mõõtetakistil saadakse Ohmi seaduse järgi U=I*R. Näiteks 100 oomi takistusega takisti 10 mA voolu korral on pinge 10 * 100 = 1000 mV, sama palju kui 1 volt! Sellisel juhul ei sõltu anduri väljundvool ühendusjuhtmete takistusest. Mõistlikes piirides muidugi. Analoogandurite ühendamine Mõõtetakistilt saadud pinget saab kergesti teisendada digitaalne vaade, sobib kontrolleri sisendiks. Teisendamine toimub analoog-digitaalmuundurite (ADC) abil. Digitaalsed andmed edastatakse kontrollerile jada- või paralleelkoodiga. Kõik sõltub konkreetsest lülitusahelast. Lihtsustatud ühendusskeem analoogsensor näidatud joonisel 3. Analooganduri ühendamine Joonis 3. Analooganduri ühendamine (suurendamiseks klõpsake pildil) Täiturid on ühendatud kontrolleriga või kontroller ise on ühendatud automaatikasüsteemi kuuluva arvutiga. Loomulikult on analooganduritel terviklik disain, mille üheks elemendiks on ühenduselementidega korpus. Näitena on joonisel 4 näidatud Zond-10 tüüpi ülerõhuanduri välimus. Ülerõhuandur Zond-10 Joonis 4. Ülerõhuandur Zond-10 Anduri allservas on näha ühenduskeere torustikuga ühendamiseks ja paremal musta katte all on pistik sideliini ühendamiseks kontrolleriga. Tihendamine keermestatud ühendus tehakse lõõmutatud vasest seibi abil (sisaldub anduri tarnepakendis), mitte kerimislindist või linast. Seda tehakse selleks, et anduri paigaldamisel sees asuv andurielement ei deformeeruks. Analooganduri väljundid Vastavalt standarditele on kolm voolusignaalide vahemikku: 0...5mA, 0...20mA ja 4...20mA. Mis on nende erinevus ja millised on nende omadused? Kõige sagedamini on väljundvoolu sõltuvus otseselt proportsionaalne mõõdetud väärtusega, näiteks mida kõrgem on rõhk torus, seda suurem on vool anduri väljundis. Kuigi mõnikord kasutatakse pöördlülitamist: vastab suurem väljundvool minimaalne väärtus mõõdetud väärtus anduri väljundis. Kõik sõltub kasutatava kontrolleri tüübist. Mõnel anduril on isegi lülitus otsesignaalilt pöördsignaalile. Väljundsignaal vahemikus 0...5mA on väga väike ja seetõttu vastuvõtlik häiretele. Kui sellise anduri signaal kõigub, samal ajal kui mõõdetud parameetri väärtus jääb muutumatuks, siis on soovitatav paigaldada paralleelselt anduri väljundiga kondensaator mahuga 0,1...1 μF. Voolusignaal vahemikus 0...20mA on stabiilsem. Kuid mõlemad need vahemikud on halvad, sest null skaala alguses ei võimalda meil juhtunut üheselt kindlaks teha. Või jõudis mõõdetud signaal tegelikult nullini, mis on põhimõtteliselt võimalik, või läks sideliin lihtsalt katki? Seetõttu püüavad nad võimalusel nende vahemike kasutamist vältida. Usaldusväärsemaks peetakse analoogandurite signaali, mille väljundvool on vahemikus 4...20 mA. Selle mürakindlus on üsna kõrge ja alumine piir, isegi kui mõõdetud signaalil on nulltase, on 4 mA, mis võimaldab öelda, et sideliin pole katki. Teine hea omadus 4...20mA vahemikus on see, et andureid saab ühendada ainult kahe juhtmega, kuna see vool annab anduri enda toiteks. See on selle voolutarve ja samal ajal ka mõõtesignaal. 4...20mA vahemikus olevate andurite toide on sisse lülitatud, nagu on näidatud joonisel 5. Samas on Zond-10 anduritel, nagu ka paljudel teistel, nende andmelehe järgi lai toitepingevahemik 10 ...38V, kuigi kõige sagedamini kasutatakse stabiliseeritud allikaid pingega 24V. Analooganduri ühendamine seadmega väline allikas toitumine Joonis 5. Analooganduri ühendamine välise toiteallikaga See diagramm sisaldab järgmisi elemente ja sümboleid. Rsh on mõõtmise šundi takisti, Rl1 ja Rl2 on sideliinide takistus. Mõõtmise täpsuse suurendamiseks tuleks Rsh-na kasutada täppismõõtetakistit. Voolu voolu vooluallikast näidatakse nooltega. On hästi näha, et toiteallika väljundvool läheb +24V klemmist, läbi liini Rl1 jõuab anduri klemmini +AO2, läbib anduri ja läbi anduri väljundkontakti - AO2, ühendusliini Rl2, takisti. Rsh naaseb -24V toiteallika terminali. See on kõik, ahel on suletud, vool voolab. Kui kontroller sisaldab 24 V toiteallikat, on anduri või mõõtemuunduri ühendamine võimalik vastavalt joonisel 6 näidatud skeemile. Analooganduri ühendamine sisemise toiteallikaga kontrolleriga Joonis 6. Analooganduri ühendamine sisemise toiteallikaga kontrolleriga Sellel diagrammil on näha veel üks element - liiteseadis takisti Rb. Selle eesmärk on kaitsta mõõtetakistit sideliini lühise või analooganduri rikke korral. Takisti Rb paigaldamine on valikuline, kuigi soovitav. Lisaks erinevatele anduritele on vooluväljundiga ka mõõtemuundurid, mida automaatikasüsteemides kasutatakse üsna sageli. Mõõtemuundur on seade pingetasemete, näiteks 220V või mitmekümne-saja-amprise voolu muundamiseks voolusignaaliks 4...20mA. Siin teisendatakse lihtsalt elektrilise signaali tase, mitte mingi füüsilise suuruse (kiirus, vool, rõhk) esitus elektrilisel kujul. Kuid reeglina ühest andurist ei piisa. Mõned kõige populaarsemad mõõtmised on temperatuuri ja rõhu mõõtmine. Selliste punktide arv kaasaegses tootmises võib ulatuda kümneni Loe ka
Alates 1950. aastatest on jälgimis- ja juhtimisrakendustes saatjatelt andmete edastamiseks kasutatud vooluahelaid. Tänu madalatele rakenduskuludele, kõrgele mürakindlusele ja võimele edastada signaale pikkadele vahemaadele, on vooluahel osutunud eriti mugavaks kasutamiseks tööstuslikes keskkondades. See materjal on pühendatud vooluahela tööpõhimõtete, projekteerimise ja konfiguratsiooni põhitõdede kirjeldusele. Voolu kasutamine andmete edastamiseks muundurist Tööstuslikud andurid kasutavad andmete edastamiseks sageli voolusignaali, erinevalt enamikust teistest anduritest, näiteks termopaaridest või pingemõõturitest, mis kasutavad pingesignaali. Hoolimata asjaolust, et muundurid, mis kasutavad pinget teabe edastamise parameetrina, on paljudes tõepoolest tõhusad tootmisülesanded, on mitmeid rakendusi, kus eelistatakse vooluomaduste kasutamist. Märkimisväärne puudus tööstuskeskkonnas signaalide edastamiseks pinge kasutamisel on signaali nõrgenemine pikkade vahemaade edastamisel takistuse olemasolu tõttu. traatliinid side. Loomulikult saate signaali kadumise vältimiseks kasutada suure sisendtakistusega seadmeid. Sellised seadmed on aga väga tundlikud läheduses asuvate mootorite, veorihmade või raadiosaatjate tekitatava müra suhtes. Vastavalt Kirchhoffi esimesele seadusele on sõlme voolavate voolude summa võrdne sõlmest välja voolavate voolude summaga. Joonis 1. Vastavalt Kirchhoffi esimesele seadusele on voolutugevus ahela alguses võrdne vooluga selle lõpus. See on mõõteahel toimimise põhiprintsiip. Voolu mõõtmine kõikjal vooluahelas (mõõteahel) annab sama tulemuse. Kasutades voolusignaale ja madala sisendtakistusega andmehõivevastuvõtjaid, saavad tööstuslikud rakendused paremast mürakindlusest ja pikemast ühenduse pikkusest palju kasu. Vooluahela komponendid Joonis 2. Vooluahela funktsionaalne diagramm. Alalisvooluallikas varustab süsteemi toiteallikaga. Muundur reguleerib voolu juhtmetes vahemikus 4 kuni 20 mA, kus 4 mA tähistab pingelist nulli ja 20 mA tähistab maksimaalset signaali. Vooluahela tööpõhimõtte paremaks mõistmiseks kaaluge näiteks süsteemi konstruktsiooni koos muunduriga, millel on järgmised tehnilised omadused: Andurit kasutatakse rõhu mõõtmiseks Alustame näite vaatamist, valides sobiva konverteri. Praegune süsteemi disain Konverteri valik Praeguse süsteemi kavandamise esimene samm on muunduri valimine. Olenemata mõõdetava muutuja tüübist (vool, rõhk, temperatuur jne) oluline tegur muunduri valimisel on selle tööpinge. Ainult toiteallika ühendamine muunduriga võimaldab reguleerida sideliini voolu. Toiteallika pinge väärtus peab olema vastuvõetavates piirides: rohkem kui nõutav miinimum, väiksem kui maksimaalne väärtus mis võib inverterit kahjustada. Näites oleva voolusüsteemi puhul mõõdab valitud andur rõhku ja selle tööpinge on 12–30 V. Kui andur on valitud, tuleb voolusignaali õigesti mõõta, et anda andurile rakendatava rõhu täpne esitus. . Andmehõiveseadme valimine voolu mõõtmiseks Oluline aspekt, millele peaksite voolusüsteemi ehitamisel tähelepanu pöörama, on vältida vooluahela tekkimist maandusahelas. Levinud tehnika sellistel juhtudel on isoleerimine. Isolatsiooni kasutades saate vältida maanduskontuuri mõju, mille esinemist on selgitatud joonisel 3. Joonis 3. Maandussilmus Maandusahelad tekivad siis, kui ahelasse on ühendatud kaks klemmi erinevad kohad potentsiaalid. See erinevus toob sideliinile lisavoolu, mis võib põhjustada mõõtmisvigu. Kuna vool ei saa läbi isolatsioonitõkke voolata, on võimendi ja signaaliallika maanduspunktid sama potentsiaaliga. See välistab võimaluse tahtmatult luua maandusahel. Joonis 4. Ühisrežiimi pinge ja signaalipinge isoleeritud vooluringis Isolatsioon hoiab ära ka andmehõiveseadme kahjustamise, kui esineb kõrge ühisrežiimi pinge. Ühisrežiimi pinge on sama polaarsusega pinge, mis esineb mõõteriistade võimendi mõlemas sisendis. Näiteks joonisel 4. Nii võimendi positiivsel (+) kui ka negatiivsel (-) sisendil on +14 V ühisrežiimi pinge. Paljude andmehõiveseadmete maksimaalne sisendvahemik on ±10 V. Kui andmehõiveseadmel puudub isolatsioon ja ühisrežiimi pinge jääb maksimaalsest sisendvahemikust välja, võite seadet kahjustada. Kuigi normaalne (signaal)pinge võimendi sisendis joonisel 4 on ainult +2 V, võib +14 V lisamisel saada pinge +16 V Eraldi on võimendi ühispunkt elektriliselt eraldatud nullist. Joonisel 4 kujutatud ahelas on võimendi ühispunkti potentsiaal "tõstetud" tasemele +14 V. See meetod põhjustab sisendpinge langemise 16 V-lt 2 V-le. Nüüd, kui andmed on kogutud, hakkab seade ei ohusta enam ülepingekahjustusi. (Pange tähele, et isolaatoritel on maksimaalne ühisrežiimi pinge, mida nad võivad tagasi lükata.) Kui andmehõiveseade on isoleeritud ja kaitstud, on vooluahela ehitamise viimane etapp sobiva toiteallika valimine. Toiteallika valimine Teie vajadustele kõige sobivama toiteallika kindlaksmääramine on lihtne. Vooluahelas töötades peab toiteallikas tootma pinge, mis on võrdne või suurem kui süsteemi kõigi elementide pingelanguste summa. Meie näite andmehõiveseade kasutab voolu mõõtmiseks täpset šunti. I*R=U 249 Ω šundilt saame eemaldada pinge vahemikus 1 kuni 5 V, seostades andmehõiveseadme sisendis oleva pinge väärtuse rõhuanduri väljundsignaali väärtusega. 12 V+ 5 V=17 V Esmapilgul piisab 17 V pingest. Siiski on vaja arvestada toiteallika lisakoormusega, mis tekib elektritakistusega juhtmetest. Ühe 2000 jala pikkuse südamiku takistus on 2000 * 2,62 / 100 = 52,4 m. Kui kasutasite kõnealuse vooluahela toiteks 17 V, on rõhuandurile antav pinge juhtmete ja šunditakisti takistuse languse tõttu madalam kui minimaalne tööpinge. Tüüpilise 24 V toiteallika valimine rahuldab inverteri võimsusnõuded. Lisaks on pingevaru rõhuanduri suuremale kaugusele paigutamiseks. Kui on valitud õige muundur, andmehõiveseade, kaabli pikkus ja toiteallikas, on lihtsa vooluahela projekteerimine valmis. Keerulisemate rakenduste korral saate süsteemi lisada täiendavaid mõõtekanaleid. Tehnoloogiliste protsesside automatiseerimisel mehhanismide ja sõlmede juhtimiseks tuleb tegeleda erinevate füüsikaliste suuruste mõõtmisega. See võib olla temperatuur, rõhk ja vedeliku või gaasi vool, pöörlemiskiirus, valguse intensiivsus, teave mehhanismide osade asukoha kohta ja palju muud. See teave saadakse andurite abil. Siin kõigepealt mehhanismide osade asukohast. Diskreetsed andurid Lihtsaim andur on tavaline mehaaniline kontakt: uks avatakse - kontakt avaneb, suletakse - sulgub. Selline lihtne andur, samuti etteantud tööalgoritm, sageli... Translatsioonilise liikumisega mehhanismi jaoks, millel on kaks asendit, näiteks veeklapp, vajate kahte kontakti: üks kontakt on suletud - klapp on suletud, teine on suletud - see on suletud. Keerulisemal translatsiooniliikumise algoritmil on mehhanism automaatse masina termoplastilise vormi sulgemiseks. Esialgu on vorm avatud, see on lähteasend. Selles asendis eemaldatakse valmistooted vormist. Järgmiseks sulgeb töötaja kaitsekatte ja vorm hakkab sulguma ning algab uus töötsükkel. Vormi poolte vaheline kaugus on üsna suur. Seetõttu liigub vorm algul kiiresti ja teatud vahemaa tagant enne poolte sulgumist rakendub piirlüliti, liikumiskiirus väheneb oluliselt ja vorm sulgub sujuvalt. See algoritm võimaldab vältida vormi sulgemisel lööke, vastasel juhul saab selle lihtsalt väikesteks tükkideks purustada. Samasugune kiiruse muutus toimub ka vormi avamisel. Siin ei piisa enam kahest kontaktandurist. Seega on kontaktipõhised andurid diskreetsed või binaarsed, neil on kaks asendit, suletud - avatud või 1 ja 0. Teisisõnu võime öelda, et sündmus on toimunud või mitte. Ülaltoodud näites "püüavad" kontaktid mitu punkti: liikumise algus, kiiruse vähendamise punkt, liikumise lõpp. Geomeetrias pole punktil mõõtmeid, lihtsalt punkt ja kõik. See võib kas olla (paberil, liikumistrajektooril, nagu meie puhul) või seda lihtsalt ei eksisteeri. Seetõttu kasutatakse punktide tuvastamiseks diskreetseid andureid. Võib-olla pole siinkohal võrdlus punktiga väga kohane, sest praktilistel eesmärkidel kasutavad nad diskreetse anduri vastuse täpsust ja see täpsus on palju suurem kui geomeetriline punkt. Kuid mehaaniline kontakt ise on ebausaldusväärne. Seetõttu asendatakse mehaanilised kontaktid võimaluse korral kontaktivabade anduritega. Lihtsaim variant on pilliroo lülitid: magnet läheneb, kontakt sulgub. Pilliroo lüliti täpsus jätab soovida selliseid andureid kasutada vaid uste asukoha määramiseks. Erinevaid kontaktivabasid andureid tuleks pidada keerukamaks ja täpsemaks võimaluseks. Kui metalllipp sisenes pessa, siis andur käivitus. Selliste andurite näide on erinevate seeriate BVK (Proximity Limit Switch) andurid. Selliste andurite reageerimise täpsus (sõidudiferentsiaal) on 3 millimeetrit.
Joonis 1. BVK seeria andur BVK andurite toitepinge on 24V, koormusvool 200mA, mis on täiesti piisav vahereleede ühendamiseks edasiseks koordineerimiseks juhtahelaga. Täpselt nii kasutatakse BVK andureid erinevates seadmetes. Lisaks BVK anduritele kasutatakse ka tüüpi BTP, KVP, PIP, KVD, PISH andureid. Igal seerial on mitut tüüpi andureid, mis on tähistatud numbritega, näiteks BTP-101, BTP-102, BTP-103, BTP-211. Kõik nimetatud andurid on mittekontaktsed diskreetsed, nende põhieesmärk on määrata mehhanismide ja sõlmede osade asukoht. Loomulikult on neid andureid palju rohkem, neist kõigist ühes artiklis kirjutada on võimatu. Erinevad kontaktandurid on veelgi levinumad ja neid kasutatakse endiselt laialdaselt. Analoogandurite rakendamine Lisaks diskreetsetele anduritele kasutatakse automaatikasüsteemides laialdaselt analoogandureid. Nende eesmärk on saada teavet erinevate füüsikaliste suuruste kohta ja mitte ainult üldiselt, vaid reaalajas. Täpsemalt füüsikalise suuruse (rõhk, temperatuur, valgustus, vooluhulk, pinge, vool) muundamine sideliinide kaudu kontrollerile edastamiseks sobivaks elektrisignaaliks ja selle edasine töötlemine. Analoogandurid asuvad tavaliselt kontrollerist üsna kaugel, mistõttu neid sageli nimetatakse väliseadmed. Seda terminit kasutatakse sageli tehnilises kirjanduses. Analoogandur koosneb tavaliselt mitmest osast. Kõige olulisem osa on anduri element - andur. Selle eesmärk on teisendada mõõdetud väärtus elektrisignaaliks. Kuid andurilt saadud signaal on tavaliselt väike. Võimendiks sobiva signaali saamiseks lülitatakse andur enamasti sillaahelasse - Wheatstone'i sild.
Joonis 2. Wheatstone'i sild Sillaahela algne eesmärk on takistuse täpne mõõtmine. AD-silla diagonaaliga on ühendatud alalisvooluallikas. Tundlik galvanomeeter, mille keskpunkt on null skaala keskel, on ühendatud teise diagonaaliga. Takisti Rx takistuse mõõtmiseks peaksite häälestustakisti R2 pööramisega saavutama silla tasakaalu ja seadma galvanomeetri nõela nulli. Instrumendi noole kõrvalekalle ühes või teises suunas võimaldab teil määrata takisti R2 pöörlemissuuna. Mõõdetud takistuse väärtus määratakse takisti R2 käepidemega kombineeritud skaalaga. Silla tasakaalutingimuseks on suhete R1/R2 ja Rx/R3 võrdsus. Sel juhul saadakse punktide BC vahel nullpotentsiaalide erinevus ja galvanomeetrit V ei voola vool. Takistite R1 ja R3 takistus on valitud väga täpselt, nende levik peaks olema minimaalne. Ainult sel juhul põhjustab isegi väike silla tasakaalustamatus diagonaali BC pinges üsna märgatava muutuse. Just seda silla omadust kasutatakse erinevate analoogandurite tundlike elementide (andurite) ühendamiseks. No siis on kõik lihtne, tehnika küsimus. Andurilt saadud signaali kasutamiseks on vaja edasist töötlemist – võimendamist ja muundamist väljundsignaaliks, mis sobib edastamiseks ja juhtahelaga töötlemiseks – kontroller. Kõige sagedamini on analoogandurite väljundsignaaliks vool (analoogvooluahel), harvem pinge. Miks praegune? Fakt on see, et analoogandurite väljundastmed on ehitatud vooluallikate baasil. See võimaldab vabaneda ühendusliinide takistuse mõjust väljundsignaalile ja kasutada pikki ühendusliine. Edasine teisendamine on üsna lihtne. Voolusignaal muundatakse pingeks, mille jaoks piisab voolu juhtimisest läbi teadaoleva takistusega takisti. Pingelangus mõõtetakistil saadakse Ohmi seaduse järgi U=I*R. Näiteks 100 oomi takistusega takisti 10 mA voolu korral on pinge 10 * 100 = 1000 mV, sama palju kui 1 volt! Sellisel juhul ei sõltu anduri väljundvool ühendusjuhtmete takistusest. Mõistlikes piirides muidugi. Analoogandurite ühendamine Mõõtetakistilt saadud pinget saab hõlpsasti muuta kontrollerisse sisestamiseks sobivaks digitaalseks vormiks. Teisendamine toimub kasutades analoog-digitaalmuundurid ADC. Digitaalsed andmed edastatakse kontrollerile jada- või paralleelkoodiga. Kõik sõltub konkreetsest lülitusahelast. Analooganduri lihtsustatud ühendusskeem on näidatud joonisel 3. Joonis 3. Analooganduri ühendamine (suurendamiseks klõpsake pildil) Täiturid on ühendatud kontrolleriga või kontroller ise on ühendatud automaatikasüsteemi kuuluva arvutiga. Loomulikult on analooganduritel terviklik disain, mille üheks elemendiks on ühenduselementidega korpus. Näitena on joonisel 4 näidatud Zond-10 tüüpi ülerõhuanduri välimus.
Joonis 4. Ülerõhuandur Zond-10 Anduri allservas on näha ühenduskeere torustikuga ühendamiseks ja paremal musta katte all on pistik sideliini ühendamiseks kontrolleriga. Keermeühendus tihendatakse lõõmutatud vasest valmistatud seibiga (sisaldub anduri tarnepakendis), mitte kerides seda lindi või linaga. Seda tehakse selleks, et anduri paigaldamisel sees asuv andurielement ei deformeeruks. Analooganduri väljundid Vastavalt standarditele on kolm voolusignaalide vahemikku: 0...5mA, 0...20mA ja 4...20mA. Mis on nende erinevus ja millised on nende omadused? Kõige sagedamini on väljundvoolu sõltuvus otseselt proportsionaalne mõõdetud väärtusega, näiteks mida kõrgem on rõhk torus, seda suurem on vool anduri väljundis. Kuigi mõnikord kasutatakse pöördlülitust: suurem väljundvool vastab mõõdetava suuruse minimaalsele väärtusele anduri väljundis. Kõik sõltub kasutatava kontrolleri tüübist. Mõnel anduril on isegi lülitus otsesignaalilt pöördsignaalile. Väljundsignaal vahemikus 0...5mA on väga väike ja seetõttu vastuvõtlik häiretele. Kui sellise anduri signaal kõigub, samal ajal kui mõõdetud parameetri väärtus jääb muutumatuks, siis on soovitatav paigaldada paralleelselt anduri väljundiga kondensaator mahuga 0,1...1 μF. Voolusignaal vahemikus 0...20mA on stabiilsem. Kuid mõlemad need vahemikud on halvad, sest null skaala alguses ei võimalda meil juhtunut üheselt kindlaks teha. Või jõudis mõõdetud signaal tegelikult nullini, mis on põhimõtteliselt võimalik, või läks sideliin lihtsalt katki? Seetõttu püüavad nad võimalusel nende vahemike kasutamist vältida. Usaldusväärsemaks peetakse analoogandurite signaali, mille väljundvool on vahemikus 4...20 mA. Selle mürakindlus on üsna kõrge ja alumine piir, isegi kui mõõdetud signaalil on nulltase, on 4 mA, mis võimaldab öelda, et sideliin pole katki. Teine hea omadus 4...20mA vahemikus on see, et andureid saab ühendada ainult kahe juhtmega, kuna see vool annab anduri enda toiteks. See on selle voolutarve ja samal ajal ka mõõtesignaal. 4...20mA vahemikus olevate andurite toide on sisse lülitatud, nagu on näidatud joonisel 5. Samas on Zond-10 anduritel, nagu ka paljudel teistel, nende andmelehe andmetel lai toitepinge vahemik. 10...38V, kuigi kõige sagedamini kasutatakse neid 24V pingega.
Joonis 5. Analooganduri ühendamine välise toiteallikaga See diagramm sisaldab järgmisi elemente ja sümboleid. Rsh on mõõtmise šundi takisti, Rl1 ja Rl2 on sideliinide takistus. Mõõtmise täpsuse suurendamiseks tuleks Rsh-na kasutada täppismõõtetakistit. Voolu voolu vooluallikast näidatakse nooltega. On hästi näha, et toiteallika väljundvool läheb +24V klemmist, läbi liini Rl1 jõuab anduri klemmini +AO2, läbib anduri ja läbi anduri väljundkontakti - AO2, ühendusliini Rl2, takisti. Rsh naaseb -24V toiteallika terminali. See on kõik, ahel on suletud, vool voolab. Kui kontroller sisaldab 24 V toiteallikat, on anduri või mõõtemuunduri ühendamine võimalik vastavalt joonisel 6 näidatud skeemile.
Joonis 6. Analooganduri ühendamine sisemise toiteallikaga kontrolleriga Sellel diagrammil on näha veel üks element - liiteseadis takisti Rb. Selle eesmärk on kaitsta mõõtetakistit sideliini lühise või analooganduri rikke korral. Takisti Rb paigaldamine on valikuline, kuigi soovitav. Lisaks erinevatele anduritele on vooluväljundiga ka mõõtemuundurid, mida automaatikasüsteemides kasutatakse üsna sageli. Andur- seade pingetasemete, näiteks 220V või mitmekümne-saja-amprise voolu muundamiseks voolusignaaliks 4...20mA. Siin teisendatakse lihtsalt elektrilise signaali tase, mitte mingi füüsilise suuruse (kiirus, vool, rõhk) esitus elektrilisel kujul. Kuid reeglina ühest andurist ei piisa. Mõned kõige populaarsemad mõõtmised on temperatuuri ja rõhu mõõtmine. Kaasaegsetes tehastes võib selliste punktide arv ulatuda mitmekümne tuhandeni. Sellest lähtuvalt on ka andurite arv suur. Seetõttu on ühe kontrolleriga kõige sagedamini ühendatud korraga mitu analoogandurit. Muidugi mitte mitu tuhat korraga, on hea, kui kümmekond on erinevad. Selline ühendus on näidatud joonisel 7.
Joonis 7. Mitme analooganduri ühendamine kontrolleriga See joonis näitab, kuidas saadakse voolusignaalist digitaalseks koodiks teisendamiseks sobiv pinge. Kui selliseid signaale on mitu, siis neid kõiki korraga ei töödelda, vaid on ajaliselt eraldatud ja multipleksitud, muidu tuleks igale kanalile eraldi ADC paigaldada. Selleks on kontrolleril vooluahela lülitusahel. Lüliti funktsionaalne skeem on näidatud joonisel 8.
Joonis 8. Analooganduri kanali lüliti (pilt klõpsatav) Mõõtetakisti (UR1...URn) pingeks muudetud vooluahela signaalid suunatakse analooglüliti sisendisse. Juhtsignaalid lähevad vaheldumisi väljundisse üks võimendi poolt võimendatud signaalidest UR1...URn ja vaheldumisi saabuvad ADC sisendisse. Digitaalseks koodiks teisendatud pinge antakse kontrollerile. Skeem on muidugi väga lihtsustatud, kuid selles on täiesti võimalik arvestada multipleksimise põhimõttega. Umbes nii ehitati Smolenski PC “Prolog” toodetud MSTS-kontrollerite analoogsignaalide sisestamise moodul (tehniliste vahendite mikroprotsessorsüsteem). Välimus MCTS-kontroller on näidatud joonisel 9.
Joonis 9. MSTS-kontroller Selliste kontrollerite tootmine on juba ammu lõpetatud, kuigi mõnes kohas, kaugel parimast, need kontrollerid endiselt teenivad. Neid muuseumieksponaate asendavad uute, enamasti imporditud (Hiina) mudelite kontrollerid. Kui kontroller on paigaldatud metallkappi, on soovitatav ühendada varjestuspunutised kapi maanduspunktiga. Ühendusliinide pikkus võib ulatuda üle kahe kilomeetri, mis arvutatakse vastavate valemite abil. Me ei loe siin midagi, kuid uskuge mind, see on tõsi. Uued andurid, uued kontrollerid Uute kontrollerite saabumisega uued analoogsensorid, mis kasutavad HART-protokolli(Highway Addressable Remote Transducer), mis tõlkes tähendab "Kiirtee kaudu kaugadresseeritud mõõtemuundurit". Anduri (väliseadme) väljundsignaal on analoogvoolusignaal vahemikus 4...20 mA, millele on peale kantud sagedusmoduleeritud (FSK - Frequency Shift Keying) digitaalne sidesignaal.
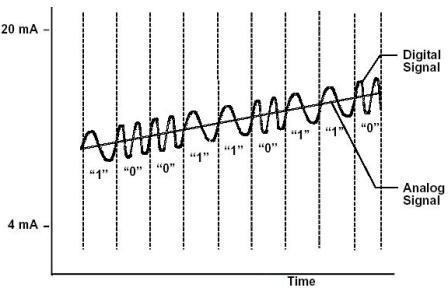
Joonis 10. Analooganduri väljund HART-protokolli kaudu Joonisel on kujutatud analoogsignaal ja siinuslaine vingerdab selle ümber nagu madu. See on sagedusmoduleeritud signaal. Kuid see ei ole üldse digitaalne signaal, seda tuleb veel ära tunda. Joonisel on märgata, et sinusoidi sagedus loogilise nulli edastamisel on suurem (2,2 KHz) kui ühiku edastamisel (1,2 KHz). Nende signaalide edastamine toimub siinusekujulise voolu amplituudiga ±0,5 mA. Teadaolevalt on siinussignaali keskmine väärtus null, seetõttu ei mõjuta digitaalse info edastamine 4...20 mA anduri väljundvoolu. Seda režiimi kasutatakse andurite konfigureerimisel. HART-i suhtlust teostatakse kahel viisil. Esimesel, standardsel juhul saavad kahejuhtmelise liini kaudu infot vahetada ainult kaks seadet, väljundsignaal aga 4...20 mA sõltub mõõdetud väärtusest. Seda režiimi kasutatakse väliseadmete (andurite) konfigureerimisel. Teisel juhul saab kahejuhtmelise liini külge ühendada kuni 15 andurit, mille arv määratakse sideliini parameetrite ja toiteallika võimsusega. See on mitmepunktirežiim. Selles režiimis on igal anduril oma aadress vahemikus 1...15, mille kaudu juhtseade sellele ligi pääseb. Andur aadressiga 0 on sideliinist lahti ühendatud. Andmevahetus anduri ja juhtseadme vahel mitmepunktirežiimis toimub ainult sagedussignaali abil. Anduri voolusignaal on fikseeritud vajalikul tasemel ja ei muutu. Mitmepunktilise side puhul ei tähenda andmed mitte ainult jälgitava parameetri tegelikke mõõtmistulemusi, vaid ka tervet kogumit kõikvõimalikku teenindusinfot. Esiteks on need andurite aadressid, juhtkäsud ja konfiguratsiooniparameetrid. Ja kogu see teave edastatakse kahejuhtmeliste sideliinide kaudu. Kas neist on võimalik ka lahti saada? Tõsi, seda tuleb teha ettevaatlikult, ainult juhtudel, kui traadita ühendus ei saa mõjutada kontrollitava protsessi ohutust. Selgub, et saate juhtmetest lahti. Juba 2007. aastal avaldati WirelessHART-standard, mille edastusmeediumiks on litsentseerimata 2,4 GHz sagedus, millel töötavad paljud juhtmevabad arvutiseadmed, sealhulgas traadita kohtvõrgud. Seetõttu saab WirelessHART seadmeid kasutada ka piiranguteta. Joonis 11 näitab WirelessHART traadita võrku. Joonis 11. WirelessHART-võrk Need tehnoloogiad on asendanud vana analoogvooluahela. Kuid see ei loobu ka oma positsioonist, seda kasutatakse kõikjal, kus see on võimalik. |













| Loe: |
|---|
Populaarne:
Aforismid ja tsitaadid enesetapu kohta
|
Uus
- Talvise poeetilise tsitaadi nägu lastele
- Vene keele tund "pehme märk pärast susisevaid nimisõnu"
- Helde puu (mõistujutt) Kuidas jõuda õnneliku lõpuni muinasjutule „Helde puu”
- Tunniplaan meid ümbritsevast maailmast teemal “Millal tuleb suvi?
- Ida-Aasia: riigid, rahvastik, keel, religioon, ajalugu Olles vastane pseudoteaduslikele teooriatele inimrasside jagamise kohta madalamateks ja kõrgemateks, tõestas ta tõde
- Ajateenistuseks sobivuse kategooriate klassifikatsioon
- Pahatihti ja armee Pahatihti armeesse ei võeta
- Miks unistate elusast surnud emast: unenägude raamatute tõlgendused
- Milliste sodiaagimärkide all on aprillis sündinud?
- Miks unistate tormist merelainetel?




